ROS2 (humble) package for Schunk WSG50
![]()
Setup
-
Setup IP for gripper and
ping 172.31.1.160 -
Open web browser with
172.31.1.160to open gripper config. -
Make sure that port number is
1501as shown in the figure.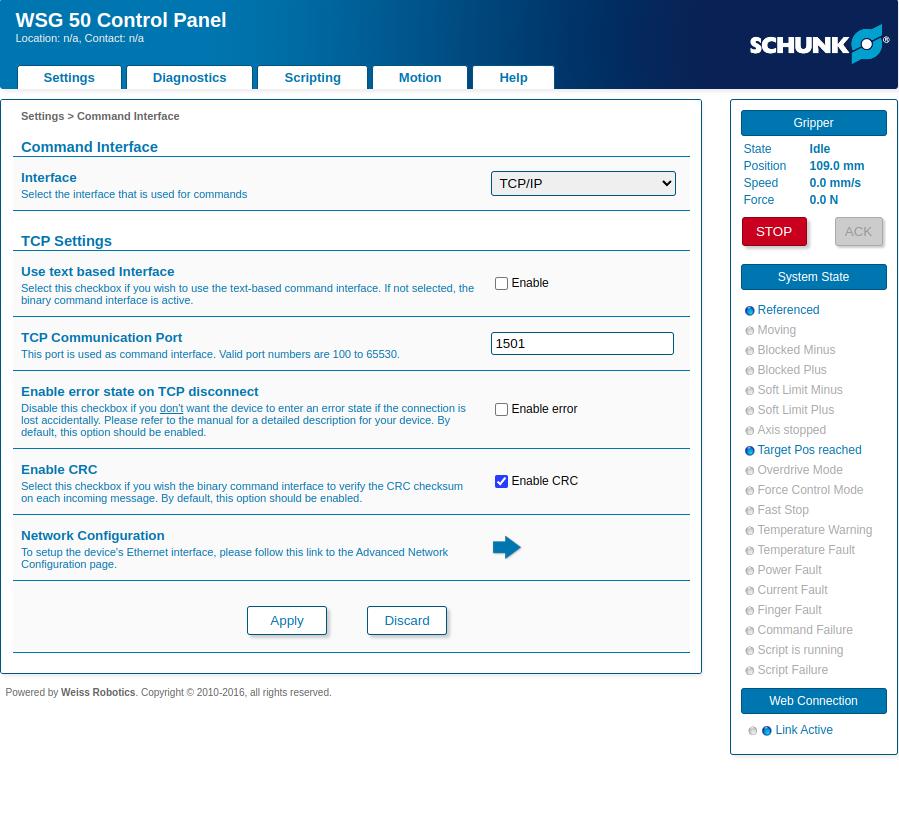
-
Change launch file (wsg50_driver/launch/gripper.launch.py) according to the IP and Port number.
declare_arguments.append( DeclareLaunchArgument( "gripper_ip", default_value="172.31.1.160", description="Gripper IP address", ), ) declare_arguments.append( DeclareLaunchArgument( "port", default_value="1501", description="Gripper Port Number", ), )

ToDo (wsg50_driver):
- Currently
set(CMAKE_BUILD_TYPE Debug)is set in CMakeLists.txt to avoid**overload**. - The error occurs in file
msg.cppline 62, ifset(CMAKE_BUILD_TYPE Debug)is not set or cmake build type is Release. - Client goal response is not called until timer is cancelled.