This repository is a simplified version of the original CenterPoint repo, with far less code, designed purely for inference (not for training).
Environment:
- Python 3.8.3
Dependencies
- SparseConv (build locally)
- DCN (build locally), produce deform_conv_cuda.cpython-38-x86_64-linux-gnu.so
- Iou3dNMS (build locally), produce iou3d_nms_cuda.cpython-38-x86_64-linux-gnu.so
- Pytorch 1.7.1 (check with
python -c "import torch; print(torch.__version__)") - argoverse-api
- CUDA 11.0 (check with
python -c "import torch; print(torch.version.cuda)")
If you wish to run viz_aggregated_sweeps.py, you must run:
Mayavi Environment: https://github.com/mne-tools/mne-python/blob/master/environment.yml
use torch::RegisterOperators
Not a problem if you use latest Pytorch?
nvcc fatal : Unknown option '-Wall' traveller59/spconv#69 CUDACXX=/usr/local/cuda/bin/nvcc python setup.py bdist_wheel pip install * --force-reinstall
https://pytorch.org/get-started/previous-versions/
- RuntimeError: /nethome/jlambert30/spconv/src/spconv/indice.cu 274 cuda execution failed with error 98 invalid device function prepareSubMGridKernel failed traveller59/spconv#34 Make sure you use the same CUDA version for all installations (set CUDA_HOME before building anything)
Added here: https://github.com/pytorch/vision/pull/1586/files
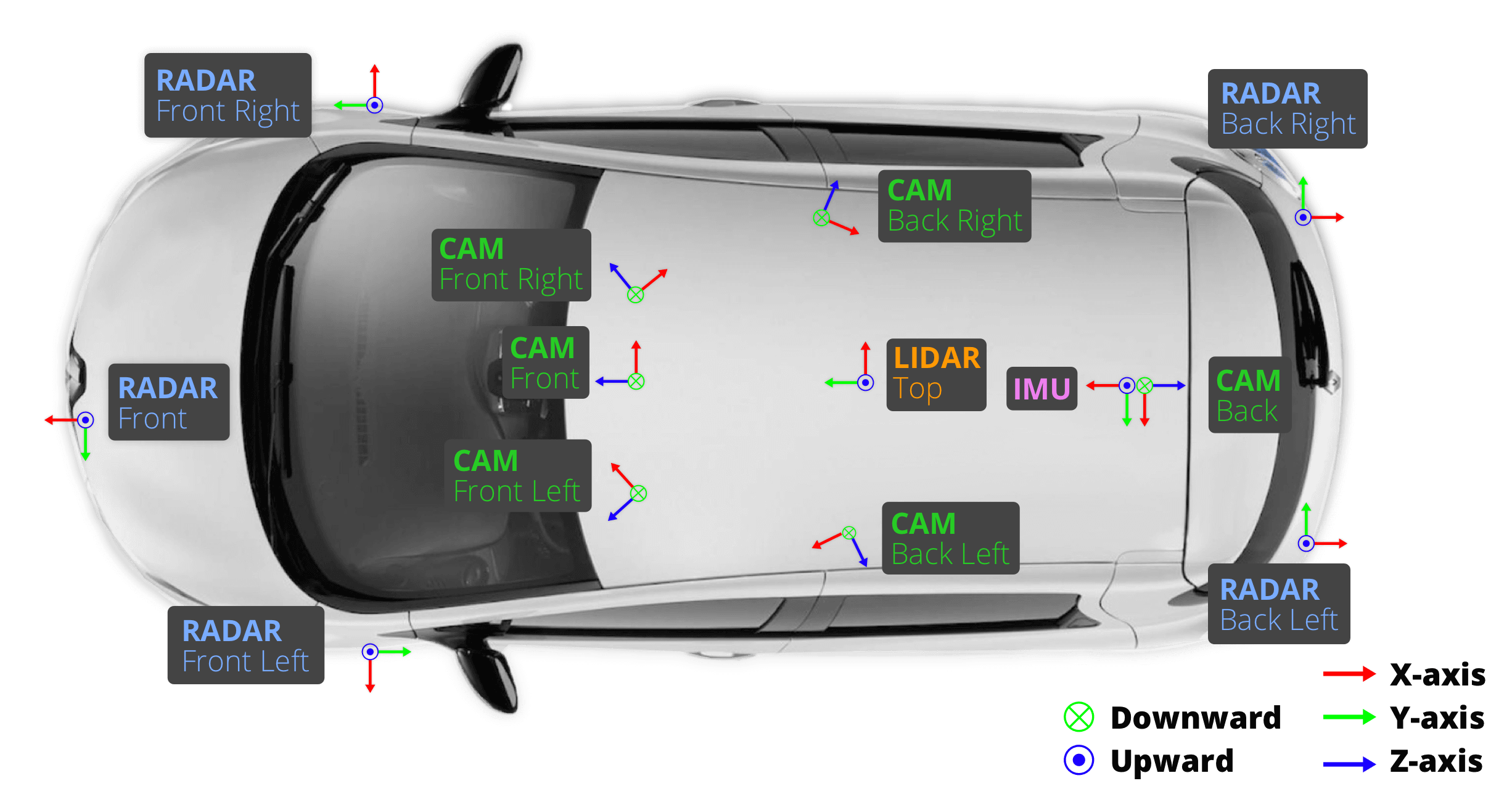
The nuScenes egovehicle coordinate frame is situated on the ground underneath the center of rear axle. Consider the pose of the LiDAR sensor in the egovehicle frame:
egovehicle_SE3_lidar.translation
array([0.94, 0. , 1.84 ])This means the LiDAR is on the center of the car, 1.84 meters above the ground. It is also almost one meter forward (+x) from the rear axle.
What about the relative orientation between the frames?
Rotation.from_matrix(egovehicle_SE3_lidar.rotation).as_euler('zyx', degrees=True)
array([-89.9, 1.4, 0.3])We see that the LiDAR frame is basically rotated -90 degrees from the egovehicle frame
np.round(egovehicle_SE3_lidar.transform_point_cloud(np.eye(3)),2)
array([[ 0.95, -1. , 1.83],
[ 1.94, 0. , 1.82],
[ 0.97, -0.01, 2.84]])

Pytorch deformable conv: https://pytorch.org/docs/stable/_modules/torchvision/ops/deform_conv.html#deform_conv2d