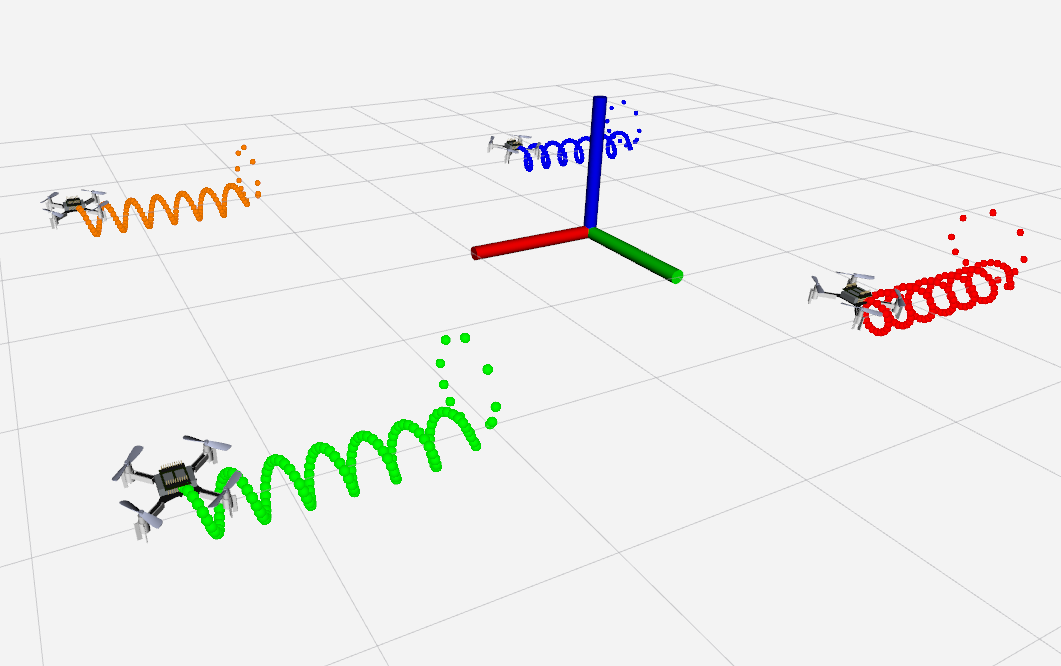
An efficient and robust multi drone simulator based on ROS (Robot Operating System). The dynamics of the drones are modeled using a set of ODEs and solved via GSL. The trajectory tracking is performed using the geometric tracking controller proposed in [2], and a standalone implementation of the same can be found at https://github.com/malintha/geo_controller/. Consider citing our work [1] if you find this code helpful for your publications.
Checkout the crazyflie branch for the tuned controller for the Crazyflie nano-drone.
Install dependencies Please install Eigen, Armadillo and GNU Science Library (GSL) before you continue.
Building the simulator
Clone the following packages to your ROS workspace. i.e: (~/catkin_ws/src/).
git clone https://github.com/malintha/multi_uav_simulator
git clone https://github.com/malintha/geo_controller/
git clone https://github.com/malintha/simulator_utils
Use catkin build to build the packages as below.
cd catkin_ws/ && source devel/setup.bash
catkin build multi_uav_simulator
Run the simulator
source devel/setup.bash
roslaunch multi_uav_simulator simu.launch
[1] Our work based on this controller:
@inproceedings{fernando2019formation,
title={Formation control and navigation of a quadrotor swarm},
author={Fernando, Malintha and Liu, Lantao},
booktitle={2019 International Conference on Unmanned Aircraft Systems (ICUAS)},
pages={284--291},
year={2019},
organization={IEEE}
}
[2] Original paper on the geometric tracking controller:
@inproceedings{lee2010geometric,
title={Geometric tracking control of a quadrotor UAV on SE (3)},
author={Lee, Taeyoung and Leok, Melvin and McClamroch, N Harris},
booktitle={49th IEEE conference on decision and control (CDC)},
pages={5420--5425},
year={2010},
organization={IEEE}
}