Overview
The motivation of this repository is to get the 3D object detection from 2D detection model such as YOLOv3 and MobileNet-SSD using depth information from RGBD camera such as realsense-D435.
Architecture
You can use any detectors with any ROS messages you like with this code. You just need to write an adaptor to convert the ROS messages into realsense_yolo::BoundingBoxes3d.msg, Here is an example for yolov4 tensorRT from ros_deep_learning
 code_architeture
code_architeture
Dependencies
- OpenCV 3
- And the ROS message from your detector for the adaptor
Adaptor provided
- MobileNet-SSD tensorRT from ros_deep_learning
- yolov4 tensorRT from yolov4_trt_ros
- MobileNet-SSD from dnn_detect
Usage
- set either mobilenetssd, mobilenetssd_tensorRT or yolov4_tensorRT in launch file to true ,then run the following command:
roslaunch realsense_yolo realsense_yolo.launch
How to convert Pixel distance to Real world distance:
-
From Intrinsic Camera Calibration
Idea: From YOLO detection result get xmin,xmax,ymin & ymax
Intrinsic_camera_calibration_of_the_kinect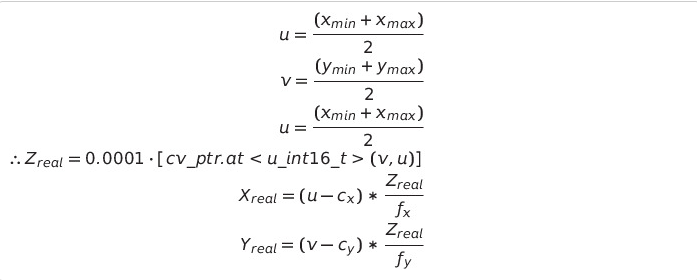 From_Intrinsic_Camera_Calibration
From_Intrinsic_Camera_Calibration
-
PointCloud from PointCloud2 to get xyz
Idea: Convert PointCloud2 to PointCloud and get the distance from the respective pixel
Link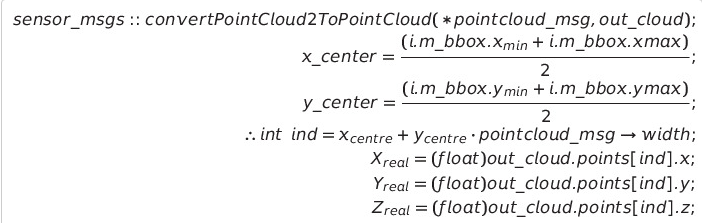 PointCloud_from_PointCloud2_to_get_xyz
PointCloud_from_PointCloud2_to_get_xyz


Troubleshooting
-
Theora & Compressed Depth Image Transport Error while rosbag record
- cv_bridge exception: '[16UC1] is not a color format. but [bgr8] is.
- Compressed Depth Image Transport - Compression requires single-channel 32bit-floating point or 16bit raw depth images (input format is: rgb8). Solution: Link
rosbag record -a -O realsense_bag.bag -x "(.*)/compressed(.*)|.*(theora)"
2 . Verify the calculated distance (if you are using the realsense SDK)
- Use realsense-viewer GUI to get the x,y & z real world distance and compare the value with the result from computation.
TODO (someday, maybe)
- [ ] Tracking such as using deep_sort
- [ ] Remove dependacy on specer_project
- [ ] Person mesh on visualization
- [ ] More object detection network
- [ ] Upload rosbag file for testing
- [ ] Incorporate zed-camera
- [ ] Restructure the file