A demonstration of using hard and soft constraints on the Leap™ quantum-classical hybrid constrained quadratic model (CQM) solver.
This example solves a problem of selecting, for a tour divided into several legs of varying lengths and steepness, a combination of locomotion modes (walking, cycling, bussing, and driving) such that one can gain the greatest benefit of outdoor exercise while not exceeding one's budgeted cost and time.

The techniques used in this example are applicable to commercial problems such as traffic routing—selecting the optimal among available means of transportation, for commuters or deliveries, given constraints of pricing, speed, convenience, and green-energy preferences—or network routing, where the routing of data packets must consider bandwidth, pricing, reliance, service tiers, and latency across numerous hops.
Constraints for optimization problems are often categorized as either “hard” or “soft”.
Any hard constraint must be satisfied for a solution of the problem to qualify as feasible. Soft constraints may be violated to achieve an overall good solution.
By setting appropriate weights to soft constraints in comparison to the objective and to other soft constraints, you can express the relative importance of such constraints. Soft constraints on binary variables can be one of two types:
- linear: the penalty for violating such a constraint is proportional to the value of the violation (i.e., by how much the constraint is violated).
- quadratic: the penalty for violating such a constraint is proportional to the square of the value of the violation.
For example, for a soft constraint on the tour's maximum cost, with a price of 3 for driving, preferring to drive over free locomotion on a leg of length 2 adds a penalty of 6 or 36, for a linear or quadratic constraint, respectively, that goes up, for a leg length of 3, to 9 and 81, respectively. Such a quadratic constraint severely discourages driving on longer legs.
This example enables you to set hard or soft constraints on the tour's cost, its duration, and the steepest leg one can walk or cycle. The CQM has hard constraints that ensure a single mode of locomotion is selected for each leg and, optionally, prevent driving on legs with toll booths.
Some of the variety of results you can obtain from the application of these constraints are shown below for an example tour1.
1. All constraints are hard.
For this case, acceptable solutions must satisfy all constraints, and the solver was unable to find a feasible solution.
2. Constraints on cost and time are relaxed to soft constraints.
The solver tries to satisfy such constraints but accepts solutions that violate one or more. Now the solver returns a solution. However, it provides little exercise because cycling is not allowed on legs even slightly steeper than the configured maximum.
3. Constraint on slope is also relaxed.
Now the returned solution is to cycle on all but the steepest slopes, gaining exercise by tolerating a wide margin of violations of the slope constraint.
4. Soft constraint on slope is set to quadratic.
Now the solver discriminates sharply between slopes that are just a bit over the configured maximum and those significantly too steep. The returned solution allows for cycling on legs that violate the slope constraint by a narrow margin.
In general, the use of soft constraints can result in imperfect but good solutions to many optimization problems: for example, in three-dimensional bin packing, which addresses problems in areas such as containers, pallets and aircraft, boxes should be fully supported to ensure stability; however, satisfying such a hard constraint might not be possible due to a variety of box sizes or bin size. Using a soft constraint that enables solutions with 70% support might be acceptable. Another example is job shop scheduling, where jobs should complete on time. If this constraint cannot be met due to conflicting constraints, a soft constraint that penalizes delays by length might return good solutions.
You can run this example without installation in cloud-based IDEs that support the Development Containers specification (aka "devcontainers").
For development environments that do not support devcontainers, install
requirements:
pip install -r requirements.txt
If you are cloning the repo to your local system, working in a virtual environment is recommended.
Your development environment should be configured to access Leap’s Solvers. You can see information about supported IDEs and authorizing access to your Leap account here.
To run the demo:
python app.pyAccess the user interface with your browser at http://127.0.0.1:8050/.
The demo program opens an interface where you can configure tour problems, submit these problems to a CQM solver, and examine the results.
Hover over an input field to see a description of the input and its range of supported values.
The upper-left section of the user interface lets you configure the tour's legs: how many, how long, and the maximum elevation gain. Additionally, you can configure your budgets of cost and time for the entire tour: modes of locomotion vary in price and speed. For example, walking is free but slower than driving. Finally, you can chose whether or not to add tollbooths randomly to 20% of the legs.
Leg lengths are set to a uniform random value between your configured minimum and maximum values. Steepness is set uniformly at random between zero and ten.
A leg's steepness affects exercising: a constraint is set to discourage (soft constraint) or disallow (hard constraint) walking or cycling on those legs that exceed the maximum slope you configured.
When you update a tour's legs, toll booths may be placed at random on some of the legs (each leg has a 20% probability that it is given a tollbooth). These affect driving in a private car (but not bussing): the generated CQM has a hard constraint to not drive on legs with toll booths. This constraint is optional.
The upper-middle section of the user interface lets you tune the constraints on cost, time, and steepness.
You can select whether to use hard or soft constraints, and for soft constraints, you can set weights and chose between linear or quadratic penalties.
The upper-right section of the user interface lets you submit your problem to a Leap hybrid CQM solver. The default solver runtime of 5 seconds is used unless you choose to increase it.
The lower section's following tabs contain information about the problem and any found solutions.
-
Graph: displays the configured problem and any found solutions in three ways:
- Space: displays relative leg lengths, steepness as a color heatmap, and toll booths as icons above the colored bar representing the tour. Modes of locomotion for the best solution found are displayed as icons below it.
- Time: displays relative leg duration and, for the best found solution, the cost per leg as a color heatmap.
- Feasibility: displays feasible and non-feasible solutions in a three-dimensional plot of exercise, cost, and time.
-
Problem: displays the legs of the tour (length, slope, and toll booths), formatted for reading and for copying into your code.
-
Solutions: displays the returned solutions, formatted for reading and as a dimod sampleset for copying into your code.
-
CQM: displays the constrained quadratic model generated for your configured tour and constraints. A good way to learn about the construction of a CQM, is to begin with a minimal problem (a single mode of locomotion, one leg, no tollbooths), study the simple CQM, and watch it change as you increase the problem's complexity.
-
Locomotion: contains information about your configured tour, such as the minimum, maximum, and average values of cost and time, and the values for the available modes of locomotion (speed, cost, exercise) that you can configure.
The problem of selecting a mode of locomotion for every leg of the tour to achieve some objective (maximize exercise) given a number of constraints (e.g., do not overpay) can be modeled as an optimization problem with decisions that could either be true or false: for any leg, should one drive? Should one walk?
This model uses up to four binary variables for each leg of the tour, each one representing whether one particular mode of locomotion is used or not. For example, leg number 5 might have the following binary variables and values in one solution:
| Binary Variable | Represents | Value in a Particular Solution |
|---|---|---|
walk_5 |
Walk leg 5 | False |
cycle_5 |
Cycle leg 5 | True |
bus_5 |
Bus leg 5 | False |
drive_5 |
Drive leg 5 | False |
In the solution above, cycling is the mode of locomotion selected for leg 5.
The CQM is built as follows with a single objective and several constraints:
-
Objective: Maximize Exercise
To maximize exercise on the tour, the CQM objective is to minimize the negative summation of values of exercise set for each locomotion mode across all the tour's legs.
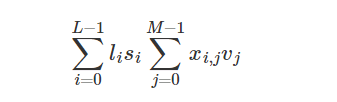
The terms above are as follows:
Because a single mode of locomotion is selected for each leg (as explained below), all the products but one are zeroed by the binary variables of that leg. For example, in leg 5 in the solution above, the leg length is multiplied by its slope and the exercise value of cycling because, for this leg, the binary variable representing cycling is the only non-zero variable.
-
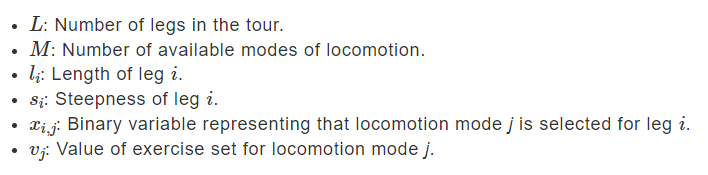
Constraint 1: Cost
To discourage or prevent the tour's cost from exceeding your preferred budget, the CQM sets a constraint that the total cost over all legs is less or equal to your configured cost. It does this by minimizing the summation of leg lengths multiplied by the cost value of locomotion mode for the leg. This can be a hard or soft constraint.

Again, for each leg the only non-zero product has the binary variable representing the selected locomotion mode.
-
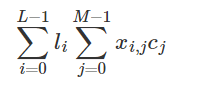
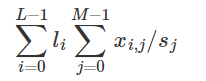
Constraint 2: Time
To discourage or prevent the tour's duration from exceeding your configured value, the CQM sets a constraint similar to that on cost but with the leg length divided by the value of speed for each mode of locomotion. This can be a hard or soft constraint.

-
Constraint 3: Steep Legs
To discourage or prevent the selection of exercising on legs where the slope is steeper than your configured maximum, the CQM sets a constraint that for each leg the binary variables representing walking and cycling multiplied by the slope be less or equal to your configured highest slope. This can be a hard or soft constraint.

-
Constraint 4: Single Mode of Locomotion Per Leg
To ensure a single mode of locomotion is selected for each leg, the sum of the binary variables representing each leg must equal one (a "one-hot" constraint). This is a hard constraint.
-
Constraint 5: Toll Booths
This optional constraint prevents driving on legs with toll booths. If you choose to enable the placement of tollbooths on some legs (tollbooths may be placed at random on a leg with 20% probability), the CQM sets a constraint that the binary variable representing driving be zero for any leg with a toll booth. This is a hard constraint.










Most the code related to configuring the CQM is in the tour_planning.py file. The remaining files mostly support the user interface.
Note: Standard practice for submitting problems to Leap solvers is to use a dwave-system sampler; for example, you typically use LeapHybridCQMSampler for CQM problems. The code in this example uses the dwave-cloud-client, which enables finer control over communications with the Solver API (SAPI).
If you are learning to submit problems to Leap solvers, use a dwave-system
solver, with its higher level of abstraction and thus greater simplicity,
as demonstrated in most the code examples of the
example collection and in the
Ocean documentation.
Released under the Apache License 2.0. See LICENSE file.
Footnotes
-
The tour comprises 20 legs of equal length, 2, with budgeted cost of 150 and duration of 5, and a steepest leg for exercising of 2. Cycling (speed 3, cost 2) and bussing (speed 5, cost 4) are the available modes of locomotion. For soft constraints, weights are set to 5. ↩