Model Predictive Control for an autonomous quadcopter (UAV)
- System modelling
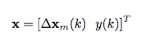
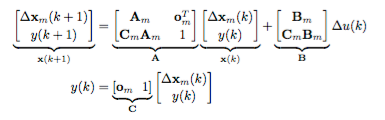
- State-Space model
- Linearization
- Controller design
- PID SISO control approach
- MPC MIMO control approach
- Observers: Kalman filter
- Simulation
- PID simulation
- MPC simulation (linear model)
- Real-Time simulation (non-linear model)
(Under construction)





-
Initialization of the variables
-
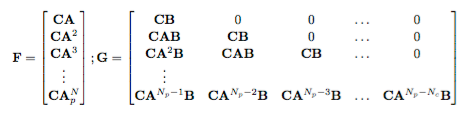
Get the augmented incremental model and the parameters of the control trajectories vector (DeltaU) based on the state-space system, the control horizon (Nc) and prediction horizon (Np)
-
Augmented incremental model
-
Incremental control trajectory vector (DeltaU) obtained from the cost function minimization


-
-
Calculate the constant part of DeltaU
-
Control loop
-
Read input signal
-
Calculate the variable part of DeltaU
-
Add both parts and apply the receding horizon control extracting first element
-
Get the control signal

-
Get the incremental system state
-








Figures from [1]
-
In the initialization variables:
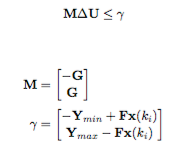
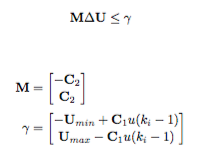
- Create M matrix
-
In the control loop:
- Calculate the gamma matrix with the constraints of the output
- Recalculate DeltaU from optimization with restrictions
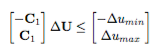
Constraint output / u / delta u:



Figures from [1]
[1] Sistemas de control en tiempo real para aplicaciones industriales: Teoría, problemas y prácticas - Ramón Guzmán 2020
[2] Dynamic Modeling and Control of a Quadrotor Using Linear and Nonlinear Approaches - H. M. Nabil ElKholy - 2014
[3] Decentralized Navigation of Multiple Quad-rotors using Model Predictive Control - I. Khan - 2017