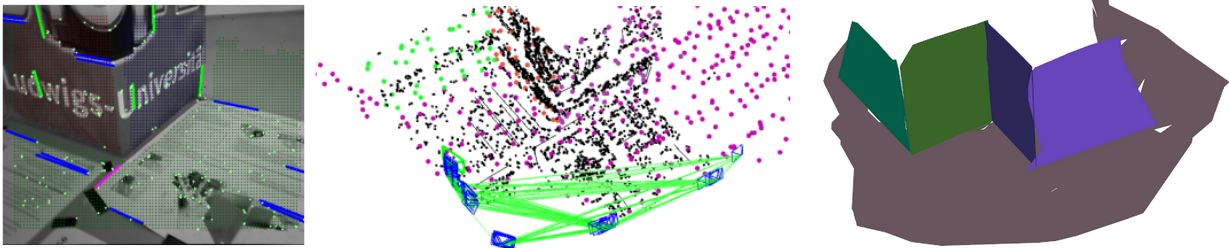
This repo proposes a RGB-D SLAM system specifically designed for structured environments and aimed at improved tracking and mapping accuracy by relying on geometric features that are extracted from the surrounding. More details can be found in our papers (RGB-D and Monocular).
Authors: Yanyan Li, Raza Yunus, Nikolas Brasch, Nassir Navab and Federico Tombari
PlanarSLAM is released under a GPLv3 license.
For commercial purposes, please contact the authors: yanyan.li (at) tum.de. If you use PlanarSLAM in an academic work, please cite:
inproceedings{Li2021PlanarSLAM,
author = {Li, Yanyan and Yunus, Raza and Brasch, Nikolas and Navab, Nassir and Tombari, Federico},
title = {RGB-D SLAM with Structural Regularities},
year = {2021},
booktitle = {2021 IEEE international conference on Robotics and automation (ICRA)},
}
We have tested the library in ubuntu 16.04 and ubuntu 18.04, but it should be easy to compile on other platforms. A powerful computer (e.g. i7) will ensure real-time performance and provide more stable and accurate results.
We use the new thread and chrono functionalities of C++11.
We use Pangolin for visualization and user interface. Dowload and install instructions can be found at: https://github.com/stevenlovegrove/Pangolin.
We use OpenCV and corresponding OpenCV_Contrib to manipulate images and features. Dowload and install instructions can be found at: http://opencv.org. Tested with OpenCV 3.4.1
Required by g2o (see below). Download and install instructions can be found at: http://eigen.tuxfamily.org. Required at least 3.1.0.
We use modified versions of the DBoW2 library to perform place recognition and g2o library to perform non-linear optimizations. Both modified libraries (which are BSD) are included in the Thirdparty folder.
We use PCL to reconstruct and visualize mesh. Download and install instructions can be found at: https://github.com/ros-perception/perception_pcl. Tested with PCL 1.7.0 and 1.9.0.
-
compile and install
cd pcl mkdir release cd release cmake -DCMAKE_INSTALL_PREFIX=/usr/local \ -DBUILD_GPU=ON -DBUILD_apps=ON -DBUILD_examples=ON \ -DCMAKE_INSTALL_PREFIX=/usr/local -DPCL_DIR=/usr/local/share/pcl .. make -j12 sudo make install
ICL NUIM, Structural TUM RGB-D, All types of Corridors
-
Download 'freiburg3_structure_texture_far' and associate RGB-D pairs based on associate.py provided by the dataset.
python associate.py PATH_TO_SEQUENCE/rgb.txt PATH_TO_SEQUENCE/depth.txt > associations.txt -
Compile the system
./build.sh
3. Run the system
./Examples/RGB-D/Planar_SLAM Vocabulary/ORBvoc.txt Examples/RGB-D/TUM3.yaml PATH_TO_SEQUENCE_FOLDER .PATH_TO_SEQUENCE_FOLDER/ASSOCIATIONS_FILE
similar command for testing ICL-NUIM sequences
./Examples/RGB-D/Planar_SLAM Vocabulary/ORBvoc.txt Examples/RGB-D/ICL.yaml PATH_TO_SEQUENCE_FOLDER PATH_TO_SEQUENCE_FOLDER/ASSOCIATIONS_FILE
inproceedings{Li2021PlanarSLAM,
author = {Li, Yanyan and Yunus, Raza and Brasch, Nikolas and Navab, Nassir and Tombari, Federico},
title = {RGB-D SLAM with Structural Regularities},
year = {2021},
booktitle = {2021 IEEE international conference on Robotics and automation (ICRA)},
}
inproceedings{Li2020SSLAM,
author = {Li, Yanyan and Brasch, Nikolas and Wang, Yida and Navab, Nassir and Tombari, Federico},
title = {Structure-SLAM: Low-Drift Monocular SLAM in Indoor Environments},
year = {2020},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
}
ORB_SLAM2 and the corresponding community.