There are 5 ros package:
- kitti_player : publish KITTI data.
- pcl_deal : contain
/PointCloudDealand/ROIviewer. Objects are detected by simple height threshold. - opencv_deal : 3D box to 2D. 3D-2Dbox overlap is simply solved by IoU and several rules. (The origin idea is to detection on
/ROIpicture, but the result is not very good./ROI2Dis results of the 3D-2Dbox.) - darknet_ros_old : Yolov3 detection node. It is a old version of eggedrobotics/darknet_ros. Thanks to their job.
- depthGet : fuse 3D-2Dbox and 2D-YOLObox in picture Coordinate by simple IoU.
The ROS node graph is as below.

The light blue box is result of Lidar. The light red box is result of YOLO. The dark red box is result of fusion.

ROS;OpenCV;PCL
- Download KITTI dataset into
kitti_player/. You can get from Baidu Wangpan password: w4qk. - Download the Yolo weight into
darknet_ros_old/darknet_ros/yolo_network_config/weights/. Please do as eggedrobotics/darknet_ros. Or you can also get YOLOv3 weights from Baidu Wangpan password: w4qk.
Check the data path and ros topic name (if you use your own dataset).
Finally, catkin_make.
-
Punlish kitti data
roslaunch kitti_player kittiplayer_standalone.launch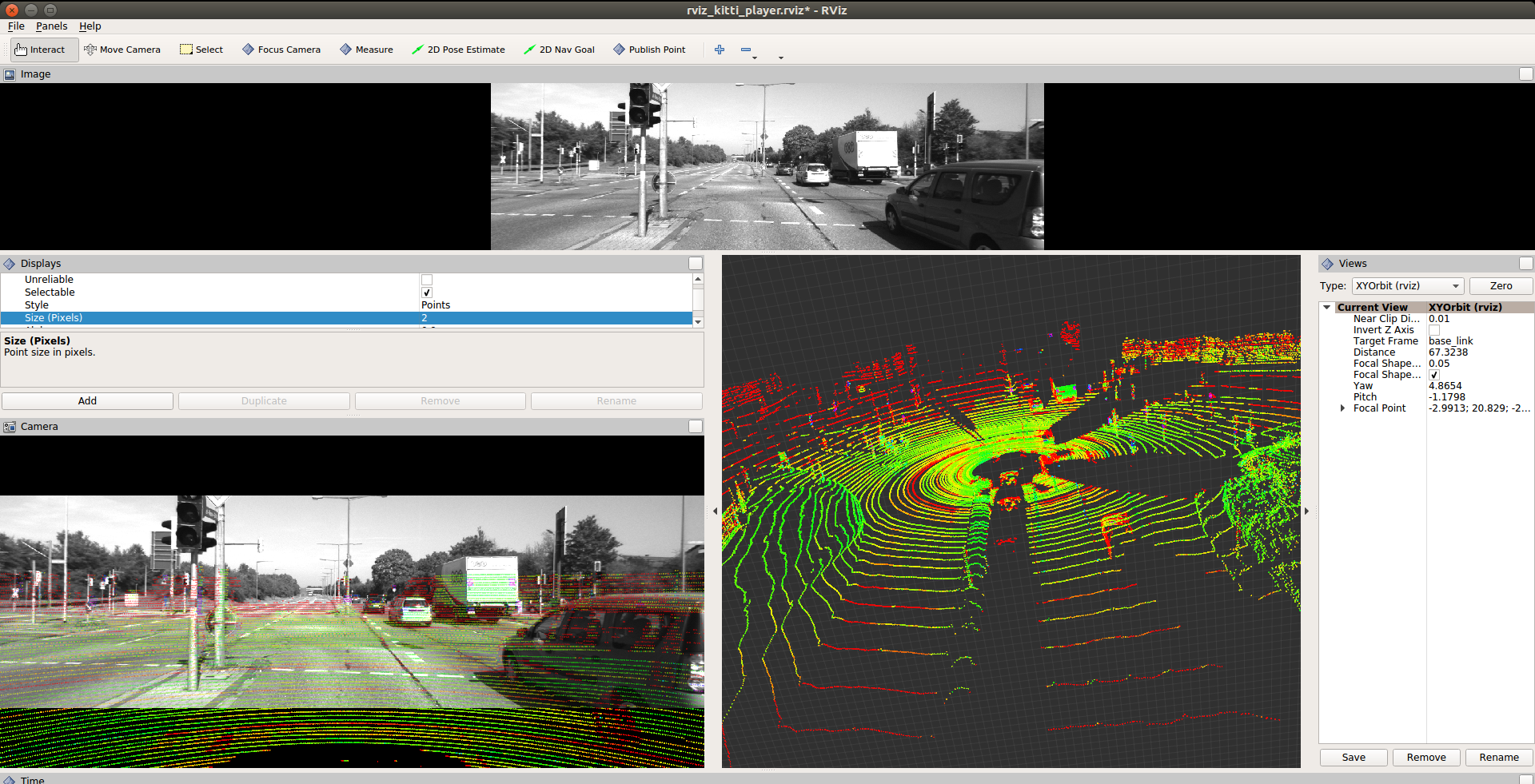
-
Point cloud detection
rosrun pcl_deal pointdealThree monitoring method are provided.
-
You can use
rosrun pcl_de pclvisto see point cloud in PCL.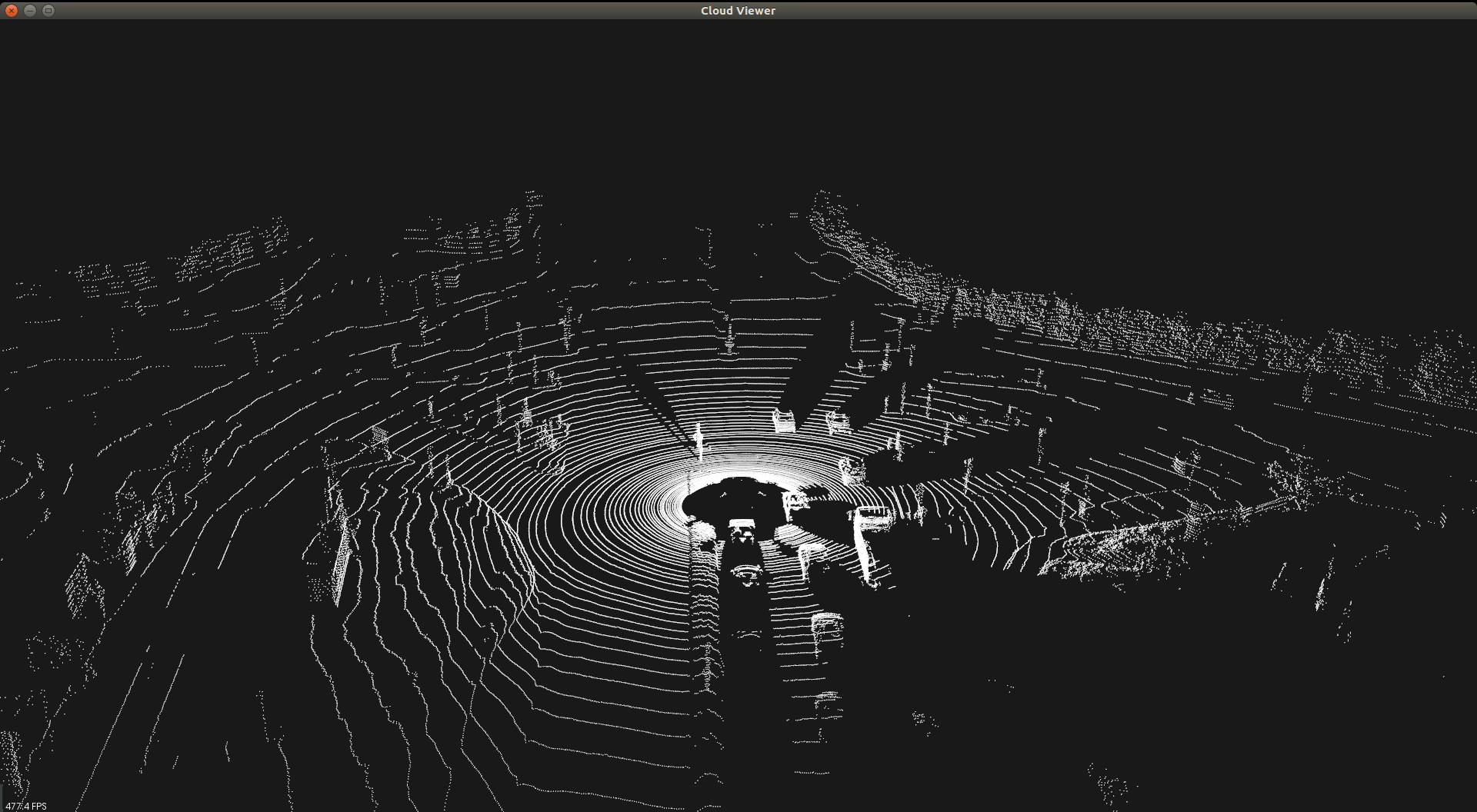
-
You can use
rvizto subscribe/ROIpointtopic in order to see the 2D grid results.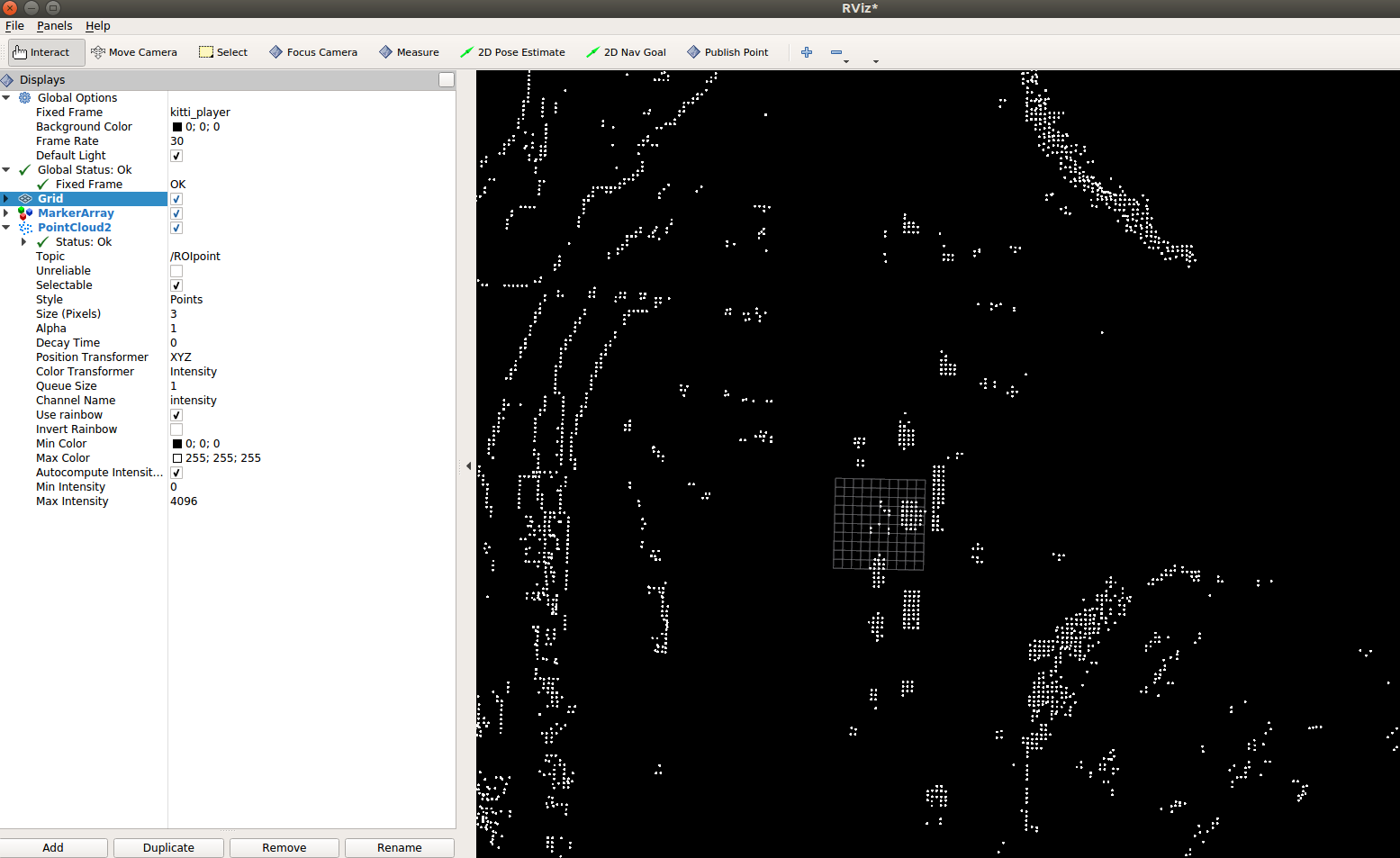
-
You can use
rosrun pcl_de ROIviewerto monitor the point cloud detection result.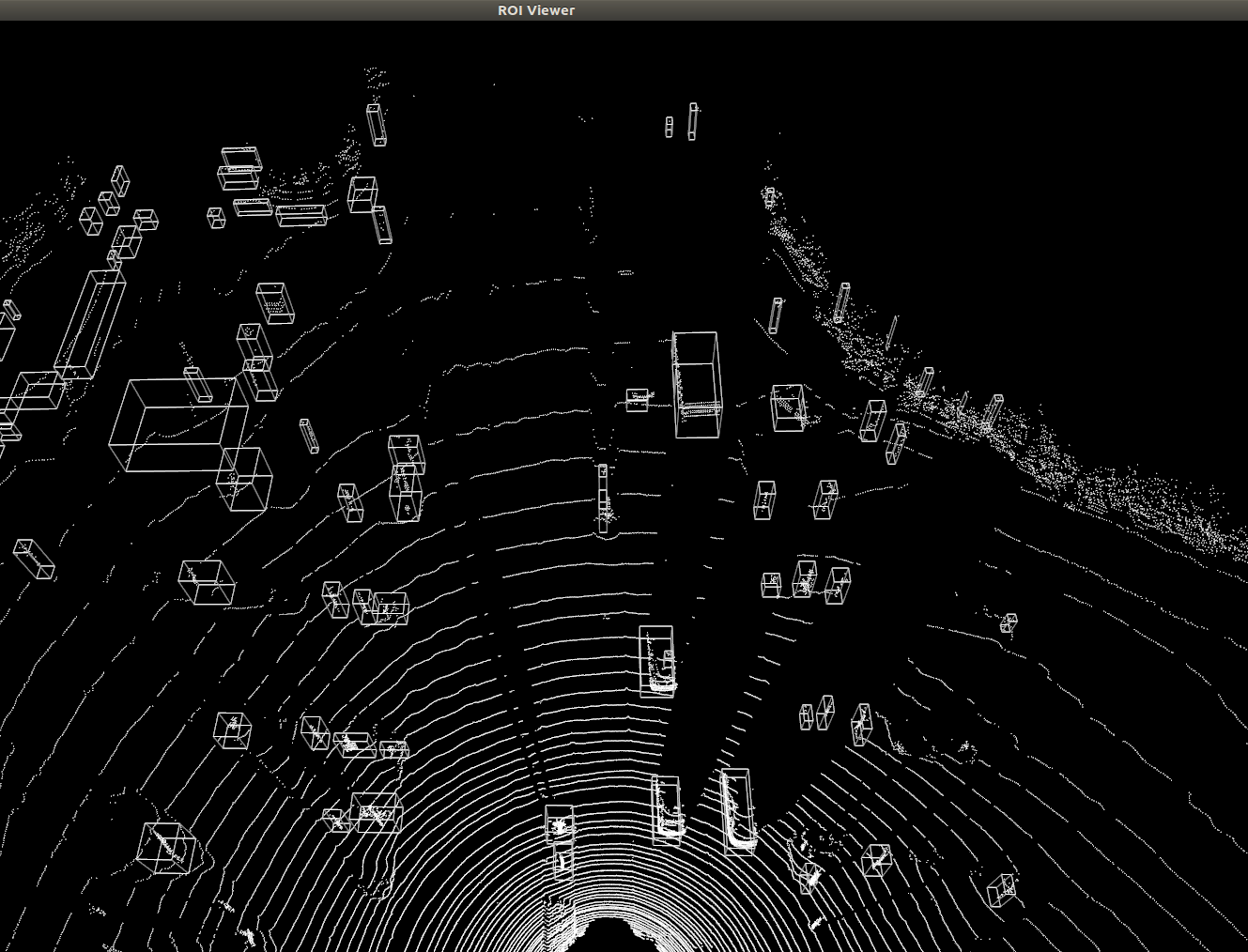
-
-
3D boxes to 2D
rosrun opencv_deal showROI -
YOLOv3
roslaunch darknet_ros_old yolo_v3.launch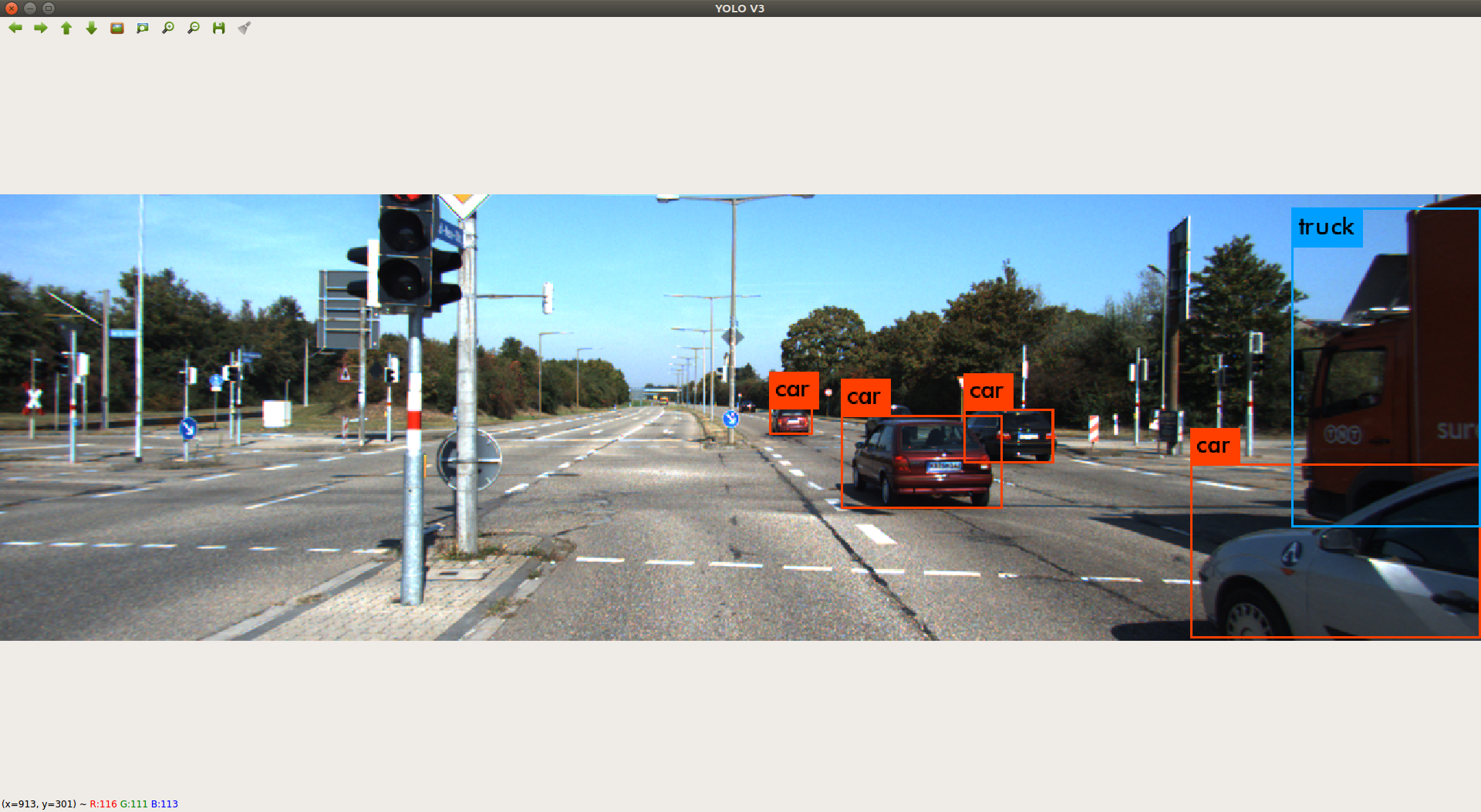
-
Finally, fuse category and location
rosrun depthG depthgetThen, have fun ! You can see the result through
/depthMaptopic.





It's a part of my undergraduate thesis. There are likely many spelling mistake and redundant code. And the codes are ugly. But I will be happy if this repo can help you. Please feel free to open an issue if you have any questions.