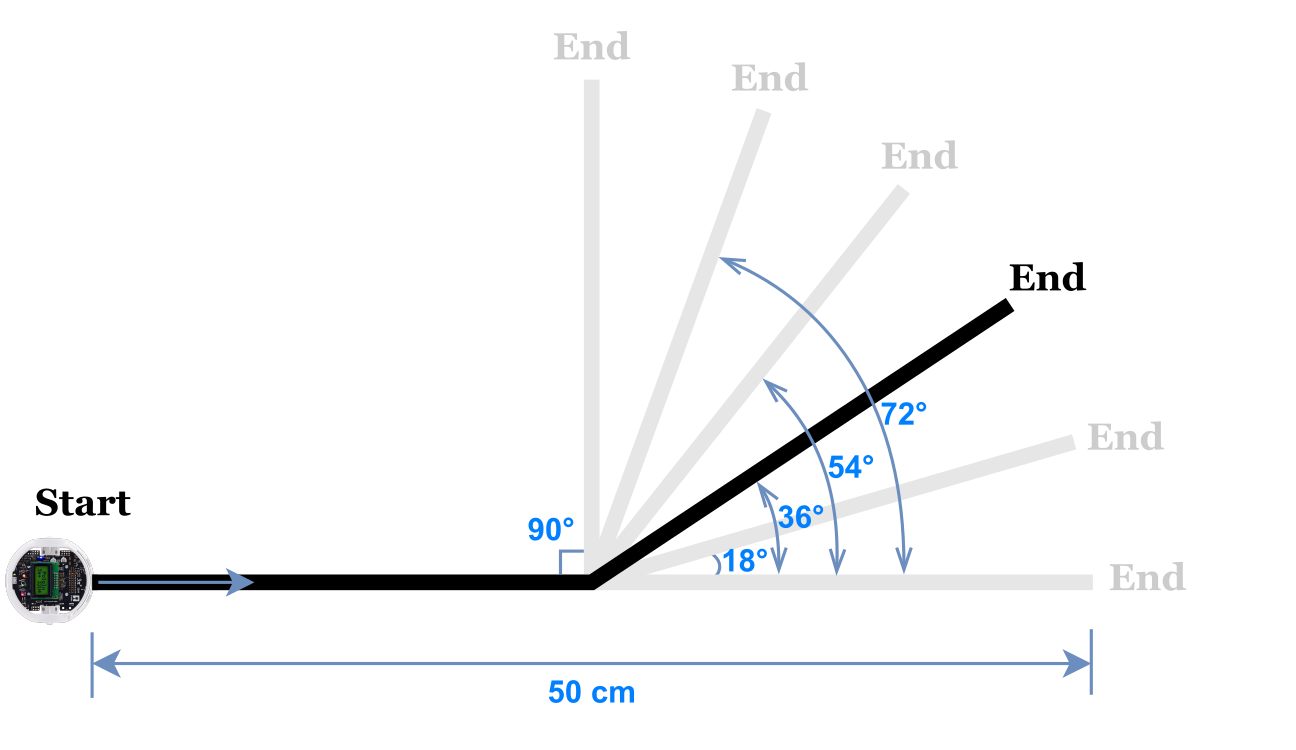
Investigate the Relationship between Feedback Error and Line-Following Angle with a PID Controller on a 3pi+32U4 robot
- Upload & run the code located in src in Arduino IDE
- Place to robot at the starting point, wait for it to finish the line following at the end point and stop.
- Within 10s, plug in the USB cable to the robot to recieve serial output from src/recoder.h
- Collect the data points and visualise it in plot/robot_data.ipynb