Robomaster-Detector/
├── detector.py #目标检测检测类
├── tracker.py #视觉跟踪类
├── armor_detection_node.py #ROS节点类
├── gimble_ctrl.py #相机模型及云台控制
├── README.md #说明文档
├── requirements.txt #python依赖模块
├── test_video.mp4 #测试视频
├── data #神经网络模型权重及配置文件
│ ├── robomaster_trt.pb #神经网络权重文件
│ ├── label_map.pbtxt #模型类别索引
├── pics #README中插入图片文件
│ ├── left_detection_right_groudtruthx.png #检测结果与标注对比
│ ├── mAP.png #模型平均精度
│ ├── train_loss.png #模型训练损失
│ ├── software_structure.svg #软件框架图
│ ├── test_result.gif #测试效果动态图
│ └──model_structure.png #模型结构图
- Ubuntu16.04
- ROS Kinetic
- python3.5
- rospy
- TensorFlow==1.14(with contrib)
- numpy
- opencv
- multiprocessing
- threading
- Queue
- cv_bridge
本项目代码为机器人的视觉感知功能,主要是识别敌方机器人方位、敌方装甲板,精确测算敌方位置,并计算敌方相对于我方的位姿信息。
-
深度学习检测器(Googlenet-SSD)
-
目标跟踪器(核相关滤波算法)
-
姿态解算与坐标变换模块(PNP算法)
装甲车的视觉检测算法采用基于深度学习的目标检测器+核相关滤波算法的目标跟踪器的模式。
深度学习部分采用改进的SSD目标检测算法,以Googlenet为模型的主干,并消去了用于检测极小目标的分支、并利用模型剪枝技术以提升检测速度。同时,以并行的方式、采用核相关滤波算法对装甲板这一目标进行跟踪,辅助深度学习算法,弥补检测速度上的不足。
采用这样的模式,既可以实现深度学习算法强大的目标检测能力和抗干扰能力,又可以实现较高的实时性。经测试,该算法的平均检测速度可达到80FPS(12.5ms/frame),满足机器人精确打击的需求。
-
软件流程如下图所示:


-
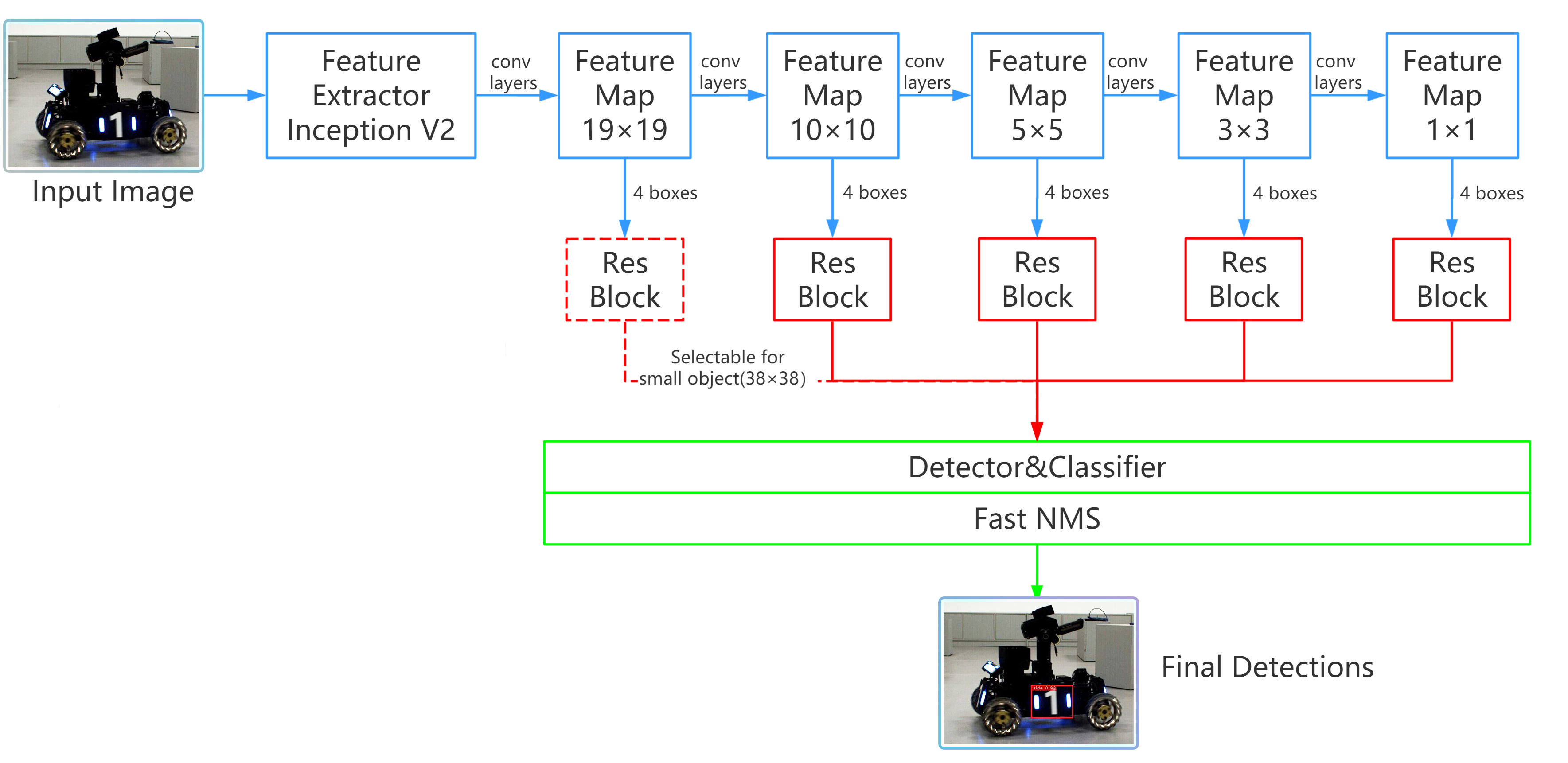
采用改进的SSD目标检测算法,输入为300*300的RGB图,输出BoundingBox的位置、类别和置信度.
-
检测目标分为七个类别:红色装甲板(red)、蓝色装甲板(blue)、装甲车前方(front)、装甲车后方(back)、装甲车左方(left)、装甲车(right)、装甲车斜方(tracking).
-
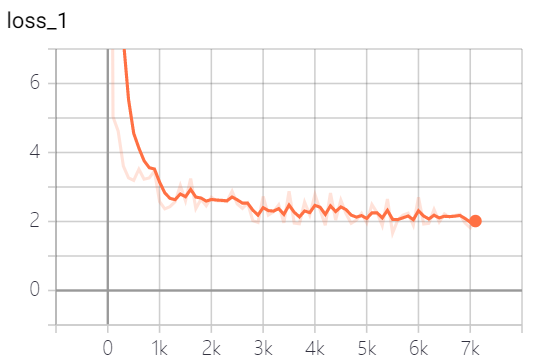
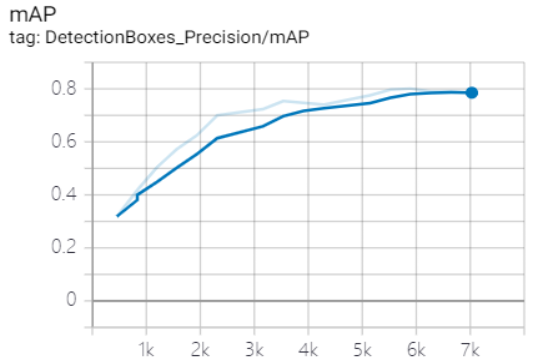
模型训练的loss及mAP:
-
网络结构图(删除了小目标预测分支):



- 采用核相关滤波算法,仅对敌方装甲板这一目标进行跟踪,以弥补深度学习算法检测速度的不足.
- 算法流程图

- 通过相机的标定方法获得相机的内参矩阵
- 以装甲板的中心建立世界坐标系,采用PNP算法求解出相机的外参矩阵 $$R=\left[\begin{matrix}a & b & c \f & g & h \k & l & m \\end{matrix} \right]$$
并根据
求解出旋转角,进而控制云台转动.
从百度网盘下载模型文件和测试视频(提取码:oza7):None
test.avi放在./robomaster_detector下,robomaster_trt.pb放在./robomaster_detector/model_data下
- 运行
pip install requirements.txt安装相关依赖 - 在./Robomaster_Detector目录下,运行
python detector.py
- 在./Robomaster_Detector/KCF目录下,运行
python setup.py build_ext --inplace - 在./Robomaster_Detector目录下,运行
python tracker.py - 用鼠标框选要跟踪的装甲板即可
- 利用virtualenv建立python3虚拟环境,并安装tensorflow、opencv-python等依赖
- 基于Python3、从ROS Kinetic源码编译ROS
- 基于python3、从源码编译cv_bridge、tf等rospackages
- 基于python3编译EnemyDirection.msg、GimbalAngle.msg两个消息文件和ShootCmd.srv、FricWhl.srv两个服务文件
- 在./Robomaster_Detector目录下,运行
armor_detection_node.py

MIT License