This repository contains the source code for our paper:
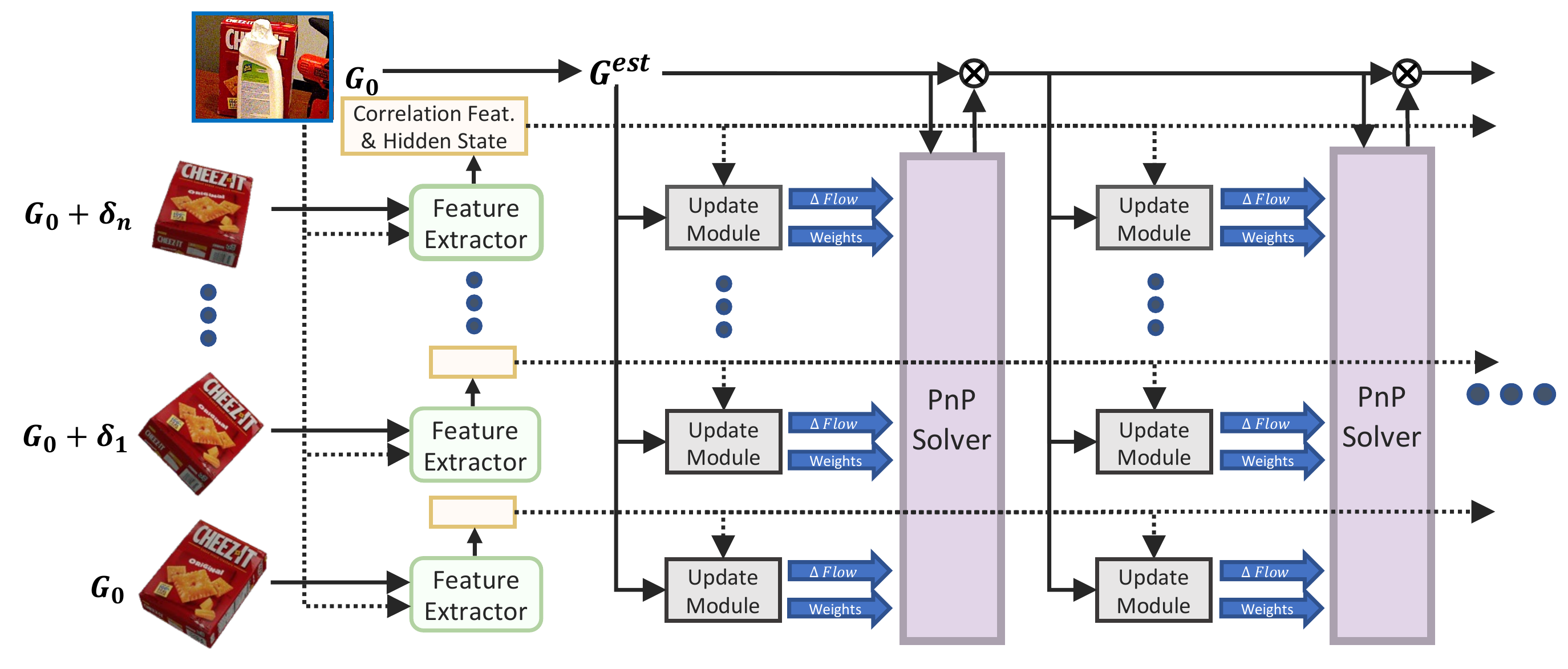
Coupled Iterative Refinement for 6D Multi-Object Pose Estimation
CVPR 2022
Lahav Lipson, Zachary Teed, Ankit Goyal and Jia Deng
Poster / Video
@inproceedings{lipson2022coupled,
title={Coupled Iterative Refinement for 6D Multi-Object Pose Estimation},
author={Lipson, Lahav and Teed, Zachary and Goyal, Ankit and Deng, Jia},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
year={2022},
}


- Clone the repo using the
--recursiveflag
git clone --recursive https://github.com/princeton-vl/coupled-iterative-refinement.git
cd coupled-iterative-refinement
- Create a new anaconda environment using the provided .yaml file (requires an NVidia GPU)
conda env create -f environment.yaml
conda activate cir
To download a sample of YCB-V, T-LESS and LM-O (513Mb), run
chmod ug+x download_sample.sh && ./download_sample.sh
Download pretrained model weights (2.4Gb) by running
chmod ug+x download_model_weights.sh && ./download_model_weights.sh
or downloaded from google drive
To demo a trained model on any the bop datasets, run
python demo.py --obj_models ycbv --scene_dir sample_ycbv --load_weights model_weights/refiner/ycbv_rgbd.pth
Replace ycbv with tless or lmo in the above arguments to use a different dataset. sample_ycbv can be downloaded using ./download_sample.sh or replaced with the path to a BOP scene directory. The refiner forward pass take ~1.12s using the default settings. The demo saves images of the pose refinement to qualitative_output/, which can be flipped through using any image viewer.
To demo our RGB-only method, use --rgb_only and replace _rgbd.pth with _rgb.pth
To evaluate/train Coupled Iterative Refinement, you will need to download at least one of the core BOP datasets:
- LM (Linemod)
- LM-O (Linemod-Occluded)
- T-LESS
- MVTec ITODD
- HB (HomebrewedDB)
- YCB-V (YCB-Video)
- IC-BIN (Doumanoglou et al.)
- TUD-L (TUD Light)
To download and unzip any of the core BOP datasets, we provide a script:
python additional_scripts/download_datasets.py --bop_dataset ycbv --models ycbv
To download the Pascal VOC dataset used for background data-augmentation, run
python additional_scripts/download_datasets.py --augmentation_textures # Downloads VOC2012
By default bop.py will search for the datasets in these locations.
├── local_data
├── VOCdevkit
├── VOC2012
├── bop_datasets
├── hb
├── icbin
├── itodd
├── lm
├── lmo
├── tless
├── tudl
├── ycbvOur method is trained separately for each of the BOP datasets. To train the YCB-V refinement model, run
python train.py --dataset ycbv --batch_size 12 --num_inner_loops 10 --num_solver_steps 3
To train a refinement model on other BOP datasets, replace ycbv with one of the following: tless, lmo, hb, tudl, icbin, itodd
The above command runs on two NVIDIA RTX 3090s (48Gb GPU Memory). To use less memory, decrease batch_size, num_inner_loops or num_solver_steps.
To run our end-to-end pipeline to reproduce our results, run
python test.py --save_dir my_evaluation --dataset ycbv --load_weights model_weights/refiner/ycbv_rgbd.pth
This will deposit a .tar file in my_evaluation/. The evaluation is slow, but can be run in parallel for different portions of the test set using --start_index and --num_images, with each run depositing a separate .tar file in my_evaluation/. If using a slurm array job to distribute testing, these arguments will be automatically set.
To evaluate the predictions, run
python additional_scripts/run_bop20_eval.py --dataset ycbv --tar_dir my_evaluation
You can also evaluate a refiner model using random perturbations from the ground-truth pose (i.e. the validation setting) by using --evaluate
python train.py --dataset ycbv --evaluate --batch_size 2 --load_weights model_weights/refiner/ycbv_rgbd.pth
To use the RGB-Only models, use --rgb_only when running python train.py, python test.py or python demo.py
We provide trained RGB-only refiners for YCB-V, T-LESS and Linemod (Occluded) which can be loaded using --load_weights
| BOP Submission | Input type | Training split | model |
|---|---|---|---|
| YCB-V (YCB-Video) | RGB-D | train_real x 1 + train_synt x 3 | ycbv_rgbd.pth |
| T-LESS | RGB-D | train_pbr x 4 + train_primesense x 1 | tless_rgbd.pth |
| LM-O (Linemod-Occluded) | RGB-D | train_pbr (Linemod) | lmo_rgbd.pth |
| HB (HomebrewedDB) | RGB-D | train_pbr | hb_rgbd.pth |
| IC-BIN (Doumanoglou et al.) | RGB-D | train_pbr | icbin_rgbd.pth |
| ITODD (MVTec ITODD) | RGB-D | train_pbr | itodd_rgbd.pth |
| TUD-L (TUD Light) | RGB-D | train_pbr x 3 + train_real x 4 | tudl_rgbd.pth |
| YCB-V (YCB-Video) | RGB | train_real x 1 + train_synt x 3 | ycbv_rgb.pth |
| T-LESS | RGB | train_pbr x 4 + train_primesense x 1 | tless_rgb.pth |
| LM-O (Linemod-Occluded) | RGB | train_pbr (Linemod) | lmo_rgb.pth |
The code for training the detectors and coarse models is available in the Cosypose Github. The training procedure is outlined at the bottom of Appendix A in their paper.
We provide a faster CUDA implementation of the correlation sampler. The code will default to this implementation if it is compiled (requires an NVidia GPU to compile, takes ~3 min).
cd pose_models/modules && pip install . && cd - # Compiles corr_sampler
This repository makes extensive use of code from the Cosypose Github repository. We thank the authors for open sourcing their implementation.