Robust communication between ROS node and CAN bus
- when we communicate between ROS node and CAN bus, we need to handle a lot of exceptions from CAN bus and safety backup between ROS node.
- Here I propose a state machine to maintain CAN bus exceptions
- and a heartbeat mechanism between ROS nodes (not i this repo yet)
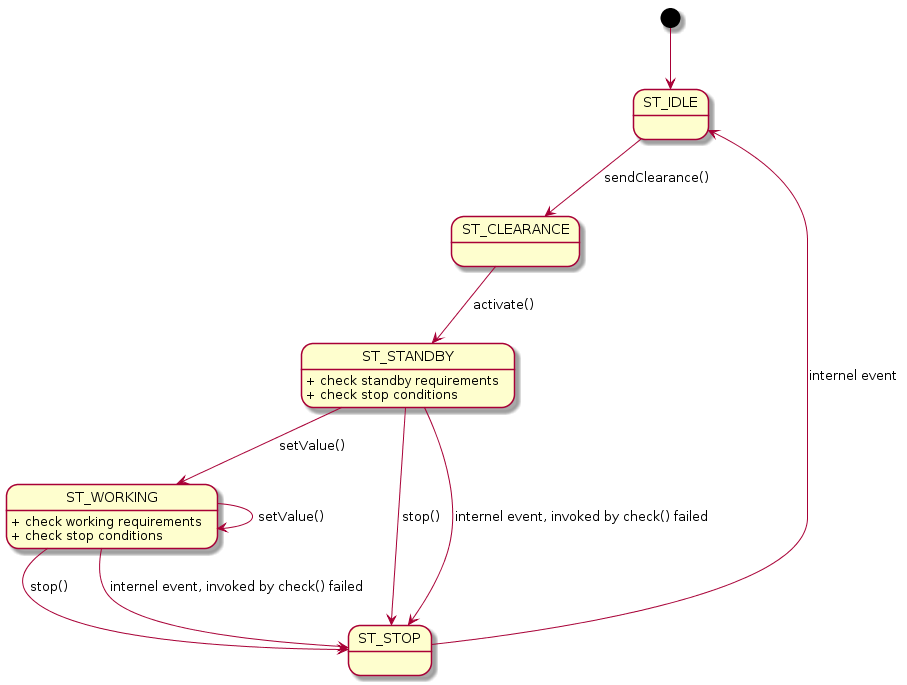
State Machine to handle exceptions
- there is a online internal requirement_check() in each state
- if a state failed to requirement_check(), this control unit will automatically shutdown, restart, and notify other units.
- The advantage of state machine is easy scaled up for exceptions, and can do internal auto-check easily.
- states list = {ST_IDLE, ST_CLEARANCE, ST_STANDBY, ST_WORKING, ST_STOP}
- user actions list = {activate(), changeValue(), cancel()}
@startuml
[*] --> ST_IDLE
ST_IDLE --> ST_CLEARANCE : sendClearance()
ST_CLEARANCE -->ST_STANDBY : activate()
ST_STANDBY --> ST_WORKING : setValue()
ST_STANDBY --> ST_STOP : stop()
ST_STANDBY : + check standby requirements
ST_STANDBY : + check stop conditions
ST_STANDBY --> ST_STOP : internel event, invoked by check() failed
ST_WORKING --> ST_WORKING : setValue()
ST_WORKING --> ST_STOP : stop()
ST_WORKING : + check working requirements
ST_WORKING : + check stop conditions
ST_WORKING --> ST_STOP : internel event, invoked by check() failed
ST_STOP --> ST_IDLE : internel event
@enduml