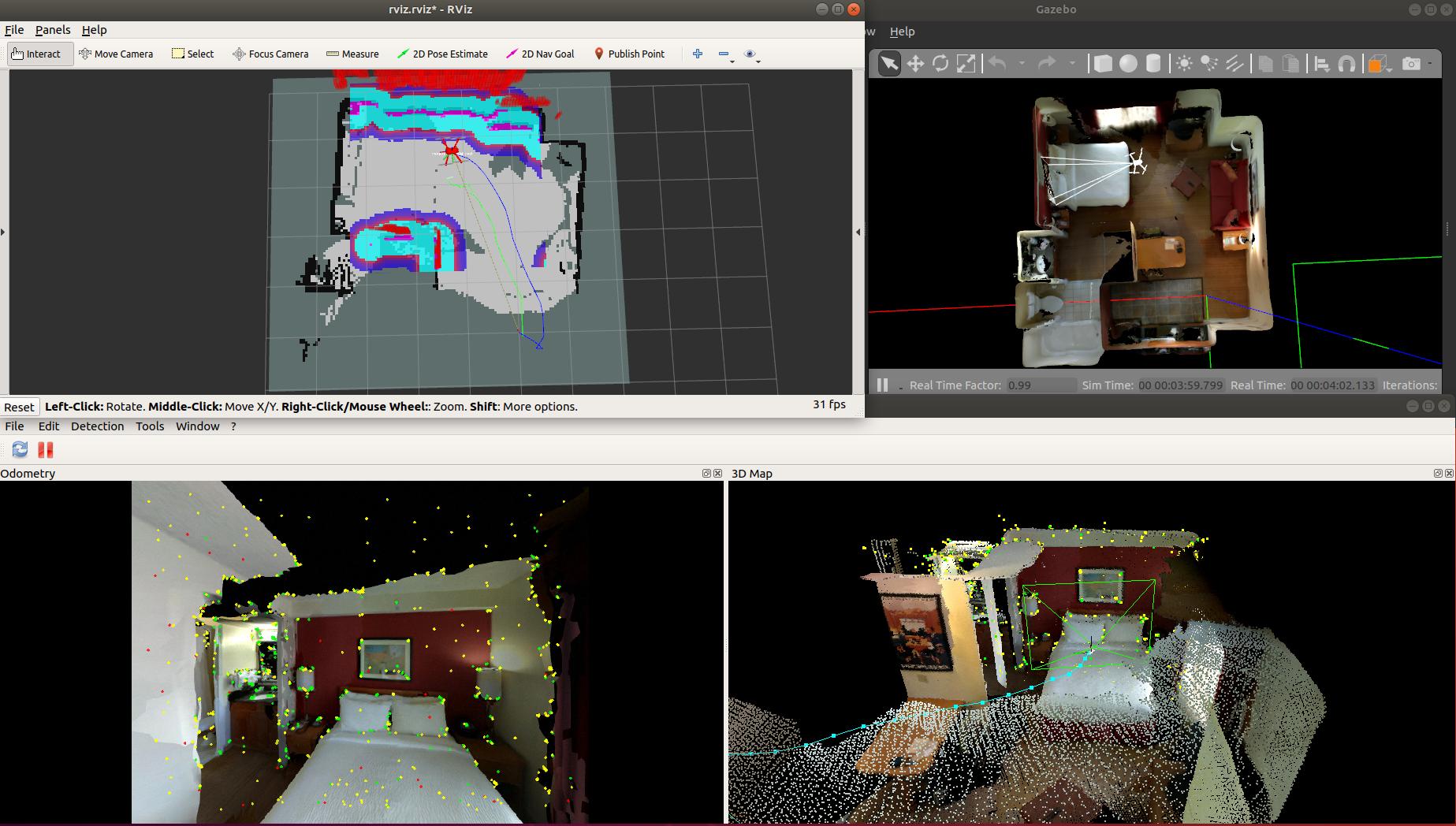
2D navigation example of a drone using move_base with mavros/px4 and rtabmap visual SLAM.
Overview video (click to watch on Youtube):

To make it simple, create the following docker image (nvidia GPU required):
git clone https://github.com/matlabbe/rtabmap_drone_example.git
cd rtabmap_drone_example
docker build -t rtabmap_drone_example -f docker/Dockerfile .Open project in VSCode and click "Reopen in container". The image will be automatically built.
Follow instructions from docker/Dockerfile to install dependencies.
Launch the simulator:
XAUTH=/tmp/.docker.xauth
touch $XAUTH
xauth nlist $DISPLAY | sed -e 's/^..../ffff/' | xauth -f $XAUTH nmerge -
docker run -it --rm \
--privileged \
--network=host \
--env="DISPLAY=$DISPLAY" \
--env="QT_X11_NO_MITSHM=1" \
--volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" \
--env="XAUTHORITY=$XAUTH" \
--volume="$XAUTH:$XAUTH" \
--runtime=nvidia \
rtabmap_drone_example \
roslaunch rtabmap_drone_example gazebo.launchLaunch VSLAM:
XAUTH=/tmp/.docker.xauth
touch $XAUTH
xauth nlist $DISPLAY | sed -e 's/^..../ffff/' | xauth -f $XAUTH nmerge -
docker run -it --rm \
--privileged \
--network=host \
--env="DISPLAY=$DISPLAY" \
--env="QT_X11_NO_MITSHM=1" \
--volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" \
--env="XAUTHORITY=$XAUTH" \
--volume="$XAUTH:$XAUTH" \
--runtime=nvidia \
rtabmap_drone_example \
roslaunch rtabmap_drone_example slam.launchLaunch rviz:
XAUTH=/tmp/.docker.xauth
touch $XAUTH
xauth nlist $DISPLAY | sed -e 's/^..../ffff/' | xauth -f $XAUTH nmerge -
docker run -it --rm \
--privileged \
--network=host \
--env="DISPLAY=$DISPLAY" \
--env="QT_X11_NO_MITSHM=1" \
--volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" \
--env="XAUTHORITY=$XAUTH" \
--volume="$XAUTH:$XAUTH" \
--runtime=nvidia \
rtabmap_drone_example \
roslaunch rtabmap_drone_example rviz.launchArm and take off:
docker run -it --rm \
--privileged \
--network=host \
rtabmap_drone_example \
rosrun rtabmap_drone_example offboardOpen 4 terminals:
/entrypoint.sh roslaunch rtabmap_drone_example gazebo.launch
/entrypoint.sh roslaunch rtabmap_drone_example slam.launch
/entrypoint.sh roslaunch rtabmap_drone_example rviz.launch
/entrypoint.sh rosrun rtabmap_drone_example offboardTo edit and use mounted code, init catkin workspace with:
source /ros_entrypoint.sh && cd /catkin_ws/src && catkin_init_workspace && cd /catkin_ws && catkin_make
then you will have to manually do what /entrypoint.sh does, but sourcing /catkin_ws/devel/setup.bash before setting the env variables:
source /opt/ros/noetic/setup.bash
source /catkin_ws/devel/setup.bash
source /usr/local/px4/Tools/setup_gazebo.bash /usr/local/px4 /usr/local/px4/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:/usr/local/px4:/usr/local/px4/Tools/sitl_gazebo
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/catkin_ws/src/rtabmap_drone_example/models
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/opt/ros/noetic/share/realsense_gazebo_plugin/models
roslaunch ...
roslaunch rtabmap_drone_example gazebo.launch
roslaunch rtabmap_drone_example slam.launch
roslaunch rtabmap_drone_example rviz.launch
rosrun rtabmap_drone_example offboard- Autonomous control: use "2D Nav Goal" button in RVIZ to set a goal to reach
- Manual control: If a joystick is plugged, you can send twists by holding L1 and moving the joysticks. Hold L1+L2 with left joystick down to land (be gentle to land smoothly), then hold left joystick in bottom-right position to disarm after the drone is on the ground.