

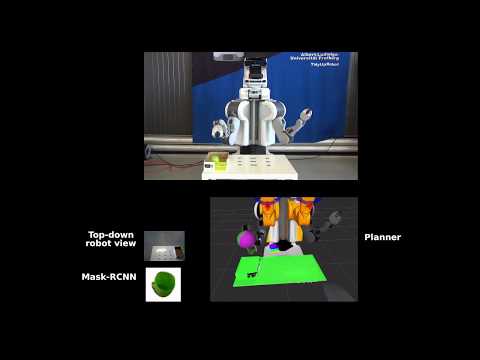
Code for deploying the self-supervised single-image 3D shape model from the IROS 2019 paper. Concretely, we showcase how using the hallucinated 3D object shapes improve the performance on the task of grasping real-world objects with a PR2 robot.
If you find the code helpful please consider citing our work.
@INPROCEEDINGS{mees19iros,
author = {Oier Mees and Maxim Tatarchenko and Thomas Brox and Wolfram Burgard},
title = {Self-supervised 3D Shape and Viewpoint Estimation from Single Images for Robotics},
booktitle = {Proceedings of the International Conference on Intelligent Robots and Systems (IROS)},
year = 2019,
address = {Macao, China},
}
- Follow the instructions to install mask-rcnn in its own conda environment with python2.
- Install Tensorflow with
conda create -n tf-gpu tensorflow-gpu==1.13.1. - Install Robot Operating System (ROS)
- Download and extract pretrained model
sh ss3d/trained_models/download_model.sh
- First we need to detect and segment the mugs in the scene. With mask-rcnn we segment the mugs and after padding them we publish the image via ROS.
You can then visualize segmentation results in Rviz under the topic
/segmented_mug_rgb. We also provide a sample image to be used as input for the shape prediction network.
conda activate caffe2_python2
python tools/infer_simple.py --cfg configs/bbox2mask_vg/eval_sw_R101/runtest_clsbox_2_layer_mlp_nograd_R101.yaml --output-dir /tmp/detectron-visualizations-vg3k-R101 --image-ext jpg --thresh 0.1 --use-vg3k --wts /home/meeso/seg_every_thing/lib/datasets/data/trained_models/33219850_model_final_coco2vg3k_seg.pkl demo_vg3k
-
Predict the 3D shape and pose given the input images with:
conda activate tf-gpu python ss3d/imageTo3D.py
-
Convert the numpy voxel grid to a point cloud and transform it to the robot frame
rosrun mesh2cloud mesh2cloud_node -
Use your favorite object grasping pipeline on the predicted point cloud, we offer a package based on GPD at https://github.com/mees/pickAndPlace-PR2
For academic usage, the code is released under the GPLv3 license. For any commercial purpose, please contact the authors.