video:
https://www.bilibili.com/video/BV1dU4y1W7H9
使用STM32CubeMX生成代码,使用了HAL库
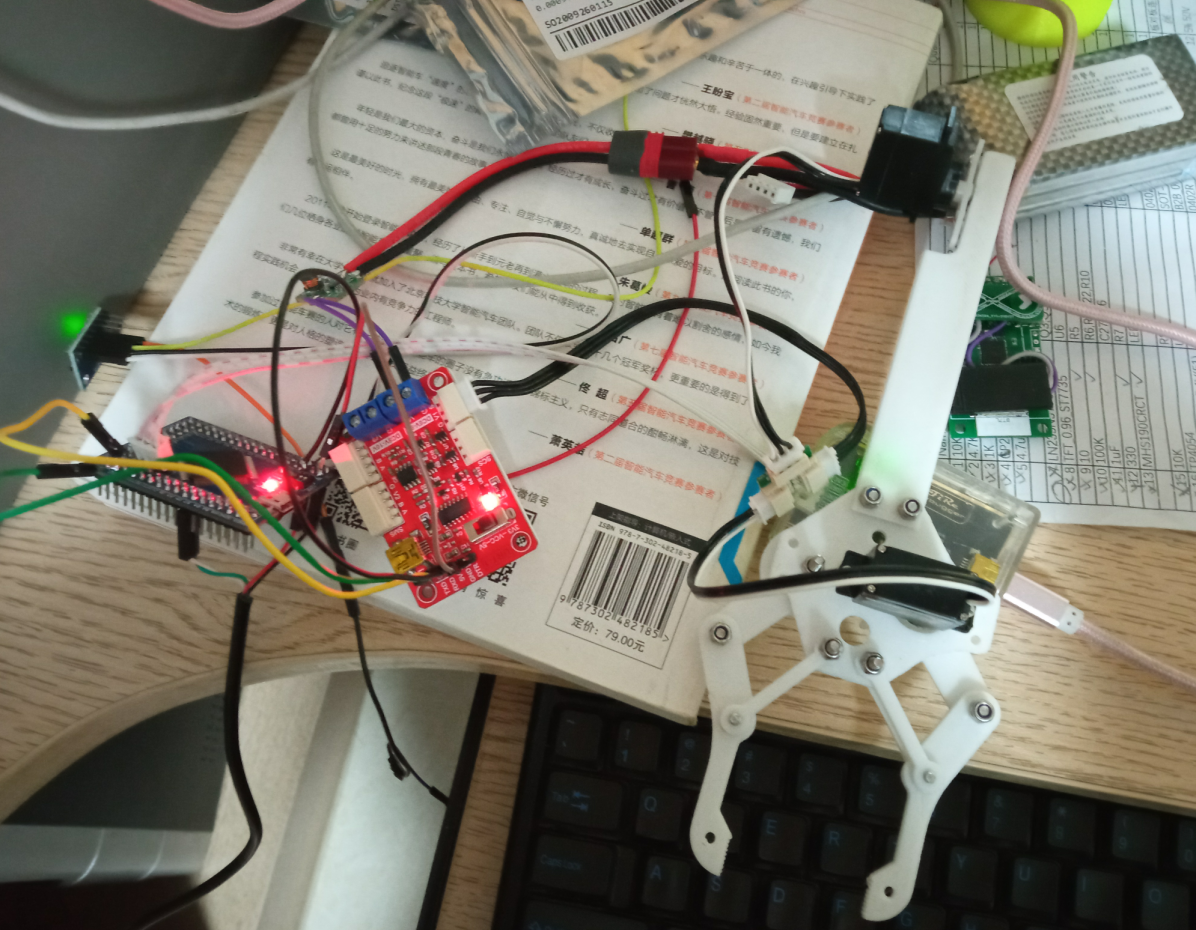
这是一个5自由度机械臂的控制程序,机械臂机械结构以3D打印制作。
移植了letter-shell,可以通过串口命令行来发送命令,调试机械臂。
可以实现舵机卸力,之后用手调整机械臂的位置,然后存储舵机角度,实现机械臂的动作组。
硬件:
- 飞特舵机SCS0009+SCS215(全部测试通过)
- 飞特UART控制板
- 3S锂电池
- BUCK降压模块
- STM32F407VET6(使用了I2C1和UART1、UART2)
- EEPROM芯片24C08(连接在I2C1)
- USB转串口模块
电脑通过USB转串口芯片连接到USART2(115200),并给STM32和舵机控制板供电
PD5 USART2_TX PD6 USART2_RX
3S锂电池通过降压模块降压到7.8V连接到飞特舵机控制板的供电端子
STM32的串口1波特率设置为1000000,连接到飞特舵机控制板的TX和RX
USART1_RX PA10 USART1_TX PA9

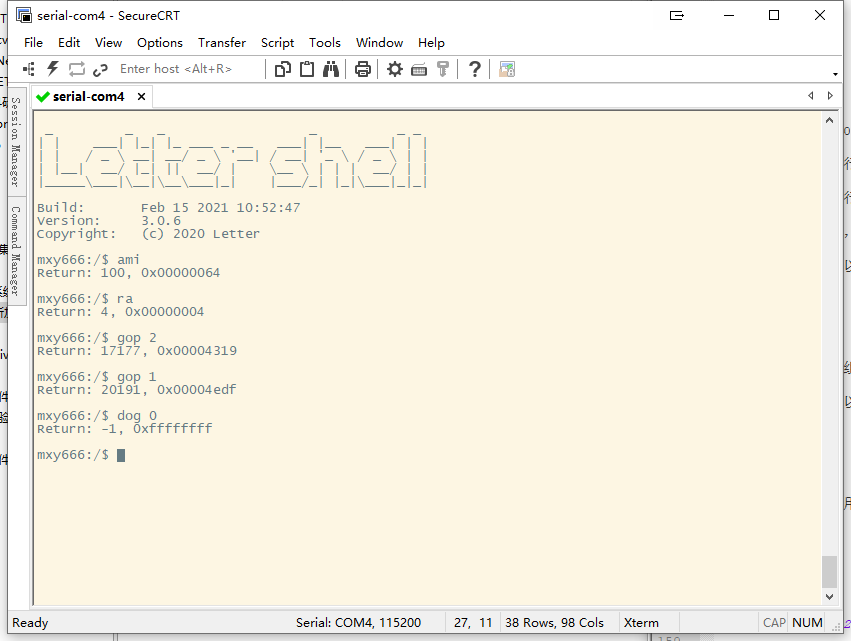
使用SecureCRT软件连接串口,复位单片机,可以得到如下界面:
_ _ _ _ _ _
| | ___| |_| |_ ___ _ __ ___| |__ ___| | |
| | / _ \ __| __/ _ \ '__| / __| '_ \ / _ \ | |
| |__| __/ |_| || __/ | \__ \ | | | __/ | |
|_____\___|\__|\__\___|_| |___/_| |_|\___|_|_|
Build: Feb 15 2021 10:52:47
Version: 3.0.6
Copyright: (c) 2020 Letter
mxy666:/$
键入以下命令并回车
cmds
可以查看到命令列表如下
Command List:
ami CMD -------- ArmInit()
amf CMD -------- ArmForceEnable(id,en)
fll CMD -------- forceAll(en)
sap CMD -------- savePos(id,time)
gop CMD -------- goPos(id)
p2g CMD -------- Pos2Group(gid,gpid,pid)
dog CMD -------- DoGroup(id)
sa CMD -------- SaveAll2ee()
ra CMD -------- readAll2ram()
wp CMD -------- WritePos(id,po,time,speed)
首先输入以下指令进行初始化
ami
然后输入以下指令关闭机械臂所有舵机的力矩输出
fll 0
之后,叫你的小伙伴将机械臂调整至合适角度,你在串口命令行输入以下指令,存储一个动作
sap 0 500
这样,如果你将舵机转至别处,然后调用以下指令恢复所有舵机力矩输出
fll 1
之后调用以下指令,执行动作0
gop 0
机械臂则会按照你前面的设置,在500ms内转至位置0处
若以同样的方法再存储一个动作2,如下
sap 1 500
则我们就可以将这两个动作连成一个动作组,指令如下
p2g 0 0 0
p2g 0 1 1
p2g 0 2 0
p2g 0 3 1
上面的第一个数字0表示我们设置的是动作组0,
第二个数字则是执行动作的顺序,
第三个数字是要执行的动作,
上面四句指令表示,动作组0使机械臂先运动到位置0,再运动到位置1,再回到0,再运动到1。
调用以下指令就可以看到这个现象
dog 0
这就是机械臂动作组的配置过程。
最后不要忘记调用以下指令保存数据,
sa
当你复位后,可调用以下指令恢复数据
ami
ra