![]()
![]()
The Mesh Navigation bundle provides software for efficient robot navigation on 2D manifolds, which are represented in 3D as triangle meshes. It enables safe navigation in various complex outdoor environments by using a modularly extensible layered mesh map. Layers can be loaded as plugins representing specific geometric or semantic metrics of the terrain. This allows the incorporation of obstacles in these complex outdoor environments into path and motion motion planning. The layered Mesh Map is integrated with Move Base Flex (MBF), which provides a universal ROS action interface for path planning, motion control, and for recovery behaviors. We also provide additional planner and controller plugins that run on the layered mesh map.

This is the active ROS 2 branch of this repository, which targets humble.
If your are looking for the old ROS 1 version, checkout the noetic branch.
Warning: The ROS 1 version of mesh_navigation is not maintained anymore.
You need a working ROS 2 installation; we target humble and jazzy at the moment. Go into a ROS 2 workspace's source directory cd $YOUR_ROS_WS/src. Then clone the source code
git clone git@github.com:naturerobots/mesh_navigation.git`Get MeshNav's ROS 2 dependencies
- Clone source dependencies: Run
vcs import --input mesh_navigation/source_dependencies.yamlin your ROS 2 workspace source directory. - Get packaged dependencies: Run
rosdep install --from-paths . --ignore-src -r -yfrom within your ROS 2 workspace source directory.
Build: Go to workspace root cd $YOUR_ROS_WS and run
colcon build --packages-up-to mesh_navigationRecommended entrypoint for new users: Check out the mesh_navigation_tutorials for a ready-to-use mesh navigation stack. Complete with simulated environment, RViz config, mesh nav config, etc.
In the following demo videos we used the developed continuous vector field planner (CVP).
| Dataset and Description | Demo Video |
|---|---|
| Botanical Garden of Osnabrück University |  |
| Stone Quarry in the Forest Brockum |  |
| Colored Point Cloud | Height Diff Layer | RGB Vertex Colors |
|---|---|---|
 |
 |
 |
This mesh_navigation stack provides a navigation server for Move Base Flex (MBF). It provides a couple of configuration files and launch files to start the navigation server with the configured layer plugins for the layered mesh map, and the configured planners and controller to perform path planning and motion control in 3D (or more specifically on 2D-manifold).
The package structure is as follows:
-
mesh_navigationThe corresponding ROS meta package. -
mbf_mesh_corecontains the plugin interfaces derived from the abstract MBF plugin interfaces to initialize planner and controller plugins with onemesh_mapinstance. It provides the following three interfaces:- MeshPlanner -
mbf_mesh_core/mesh_planner.h - MeshController -
mbf_mesh_core/mesh_controller.h - MeshRecovery -
mbf_mesh_core/mesh_recovery.h
- MeshPlanner -
-
mbf_mesh_navcontains the mesh navigation server which is built on top of the abstract MBF navigation server. It uses the plugin interfaces inmbf_mesh_coreto load and initialize plugins of the types described above. -
mesh_mapcontains an implementation of a mesh map representation building on top of the generic mesh interface implemented in lvr2. This package provides a layered mesh map implementation. Layers can be loaded as plugins to allow a highly configurable 3D navigation stack for robots traversing on the ground in outdoor and rough terrain. -
mesh_layersThe package provides a couple of mesh layers to compute trafficability/traversibility properties of the terrain. Furthermore, these plugins have access to the HDF5 map file and can load and store layer information. The mesh layers can be configured for the robots abilities and needs. Currently we provide the following layer plugins:- HeightDiffLayer -
mesh_layers/HeightDiffLayer - RoughnessLayer -
mesh_layers/RoughnessLayer - SteepnessLayer -
mesh_layers/SteepnessLayer - RidgeLayer -
mesh_layer/RidgeLayer - ClearanceLayer -
mesh_layers/ClearanceLayer - InflationLayer -
mesh_layers/InflationLayer - BorderLayer -
mesh_layers/BorderLayer - ObstacleLayer -
mesh_layers/ObstacleLayer
- HeightDiffLayer -
-
dijkstra_mesh_plannercontains a mesh planner plugin providing a path planning method based on Dijkstra's algorithm. It plans by using the edges of the mesh map. The propagation start a the goal pose, thus a path from every accessed vertex to the goal pose can be computed. This leads to a sub-optimal potential field, which highly depends on the mesh structure. -
cvp_mesh_plannercontains a Fast Marching Method (FMM) wave front path planner to take the 2D-manifold into account. This planner is able to plan over the surface, due to that it results in shorter paths than thedijkstra_mesh_planner, since it is not restricted to the edges or topology of the mesh. A comparison is shown below. Please refer to the paperContinuous Shortest Path Vector Field Navigation on 3D Triangular Meshes for Mobile Robots.
The following table gives an overview of all currently implemented layer plugins available in the stack and the corresponding types to specify for usage in the mesh map configuration. An example mesh map configuration is shown below.
| Layer | Plugin Type Specifier | Description of Cost Computation | Example Image |
|---|---|---|---|
| HeightDiffLayer | mesh_layers/HeightDiffLayer |
local radius based height differences |  |
| RoughnessLayer | mesh_layers/RoughnessLayer |
local radius based normal fluctuation |  |
| SteepnessLayer | mesh_layers/SteepnessLayer |
arccos of the normal's z coordinate |  |
| RidgeLayer | mesh_layer/RidgeLayer |
local radius based distance along normal |  |
| ClearanceLayer | mesh_layers/ClearanceLayer |
comparison of robot height and clearance along each vertex normal |  |
| InflationLayer | mesh_layers/InflationLayer |
by distance to a lethal vertex |  |
| BorderLayer | mesh_layers/BorderLayer |
give vertices close to the border a certain cost |  |
| ObstacleLayer | mesh_layers/ObstacleLayer |
marks vertices blocked by dynamic obstacles as lethal. Cost layer (left) and gazebo sim with unmapped obstacle (right) |  |
Currently the following planners are available:
mesh_planner:
type: 'dijkstra_mesh_planner/DijkstraMeshPlanner' mesh_planner:
type: 'cvp_mesh_planner/CVPMeshPlanner' mesh_planner:
type: 'mmp_planner/MMPPlanner'Note: The MMP planner is currently only available with ROS 1 / mmp-planner branch.
The planners are compared to each other.
| Vector Field Planner | Dijkstra Mesh Planner | ROS Global Planner on 2.5D DEM |
|---|---|---|
 |
 |
 |
mesh_controller:
type: 'mesh_controller/MeshController'Please reference the following papers when using the navigation stack in your scientific work.
@inproceedings{puetz20163dnav,
title = {3D Navigation Mesh Generation for Path Planning in Uneven Terrain},
author = {Pütz, Sebastian and Wiemann, Thomas and Sprickerhof, Jochen and Hertzberg, Joachim},
booktitle = {9th IFAC Symposium on Intelligent Autonomous Vehicles (IAV)},
series = {IFAC-PapersOnLine},
volume = {49},
number = {15},
pages = {212--217},
year = {2016},
doi = {10.1016/j.ifacol.2016.07.734}
}@inproceedings{puetz21cvp,
title = {Continuous Shortest Path Vector Field Navigation on 3D Triangular Meshes for Mobile Robots},
author = {Pütz, Sebastian and Wiemann, Thomas and Kleine Piening, Malte and Hertzberg, Joachim},
booktitle = {2021 IEEE International Conference on Robotics and Automation (ICRA)},
year = {2021},
doi = {10.1109/ICRA48506.2021.9560981}
}@phdthesis{puetz2022diss,
title = {Navigation Control \& Path Planning for Autonomous Mobile Robots}
author = {Sebastian Pütz},
school = {Universität Osnabrück},
year = {2022},
doi = {10.48693/69}
}We developed the Mesh Tools as a package consisting of message definitions, RViz plugins and tools, as well as a persistence layer to store such maps. These tools make the benefits of annotated triangle maps available in ROS and allow to publish, edit and inspect such maps within the existing ROS software stack.
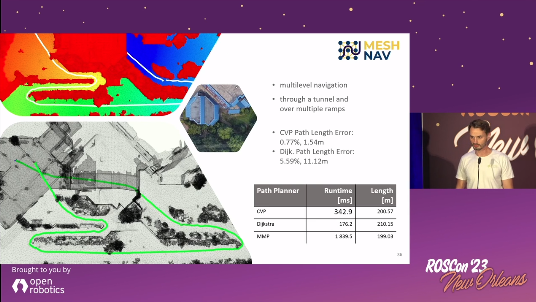
For the necessary localization of the robot relative to the mesh, we recommend using RMCL: https://github.com/uos/rmcl. We presented the combination of both software packages at ROSCon 2023:
Maintainers:
- Matthias Holoch (Nature Robots)
- Alexander Mock (Osnabrück University)
- Sebastian Pütz (Nature Robots, DFKI)
Author: Sebastian Pütz
We are happy to receive improvements to the mesh navigation stack. Just open an issue. PRs are welcome!