Term2-Project1: Extended Kalman Filters
This project impelments the Extended Kalman filters in C++ for RADAR and LIDAR data. LIDAR data constitutes of x & y positions and RADAR data constitutes of radius, angle and radial velocity. These values are combined using a linear motion model in a 2D plane.
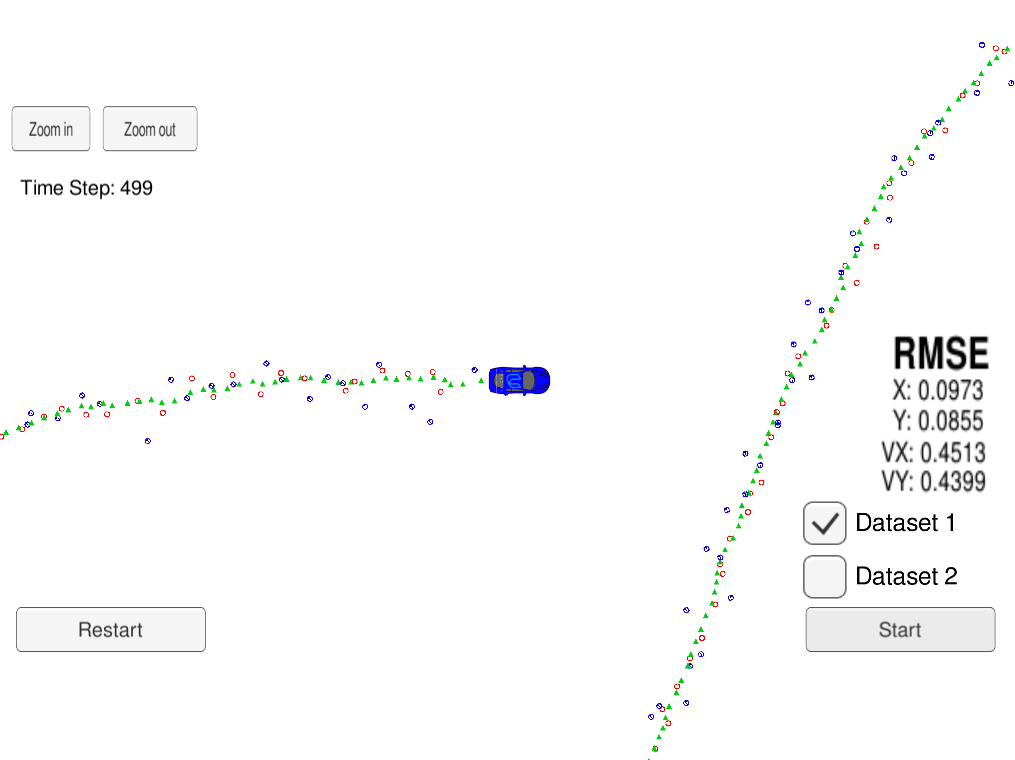
This project works with the Udacity's simulator, which reads input data from the dataset file and the calculated RMSE is displayed on the simulator.
To run the project, first start the simulator and then run the generated FusionEKF binary from the project.