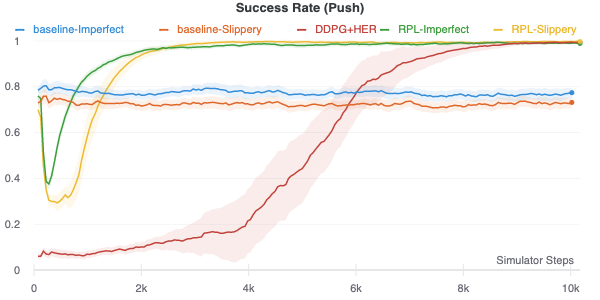
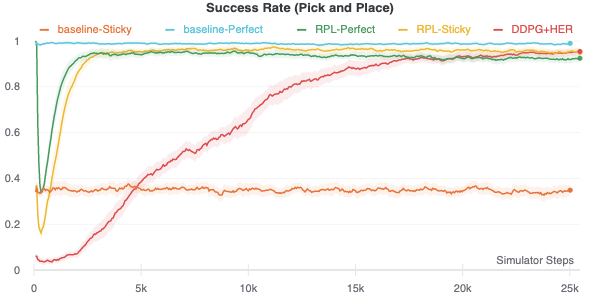
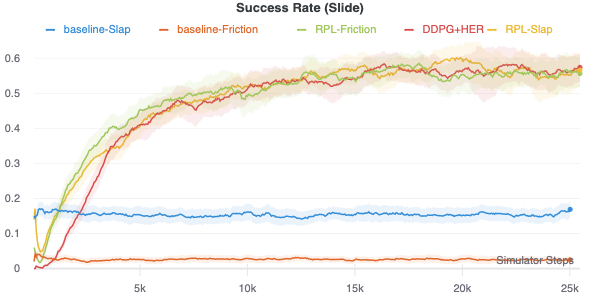
6.881 Robotic Manipulation Course Project, MIT Fall 2020 - Implementation of Residual Policy Learning
pip install -r requirements.txt or pip3 install -r requirements.txt
All the experiments will be logged with a library called "Wandb". So make sure that you first make an account in wandb here and login your terminal using wandb login
python RL/ddpg/ddpg.py --n_cycles=10 --env_name='FetchReach'
mpirun -np 1 python -u RL/ddpg/ddpg_mpi.py --env_name='FetchReach' --n_cycles=10
python RL/sac/sac.py --env_name="robosuiteNutAssemblyDense
- Improve README with more plots and project information.
- Add information about all files.
- Make SAC modular.
- Add report, video links.
- If possible add wandb report and link to network weights.