Alex is a Search and Rescue (SAR) robot built using Raspberry Pi, Arduino, Lidar, with a TLS client-server setup, using C/C++. The goal is to navigate an unseen room solely using commands sent via a laptop, mapping out the room environment via information sent from the robot. The full report can be found here.
Click the image below for a short video on our project!
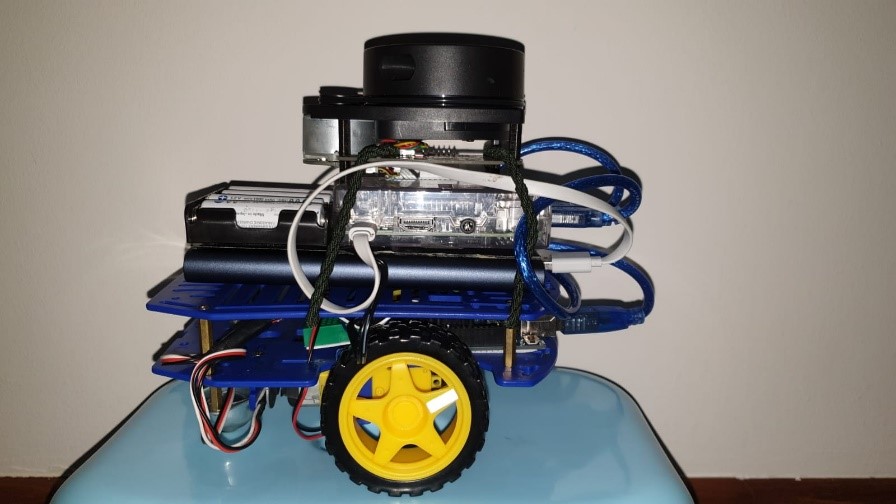
- Build Alex according to
CG1112 Final Report 4-1-2.pdf - (Pi, Arduino) Compile and Upload
Arduino/Alex/Alex.inoto Arduino - (Pi) Compile and Run
Pi/tls-server-lib/tls-alex-server.cpp - (Laptop) Compile and Run
Laptop/tls-client-lib/tls-alex-client.cpp - (Pi, LiDAR) Compile and Run
LiDAR/w7s2.cpp - (Pi, LiDAR) Run
gnuplotonLiDAR/lidar_plot_live.plt - Remotely control Alex using commands