Collision risk estimation using stochastic motion models.
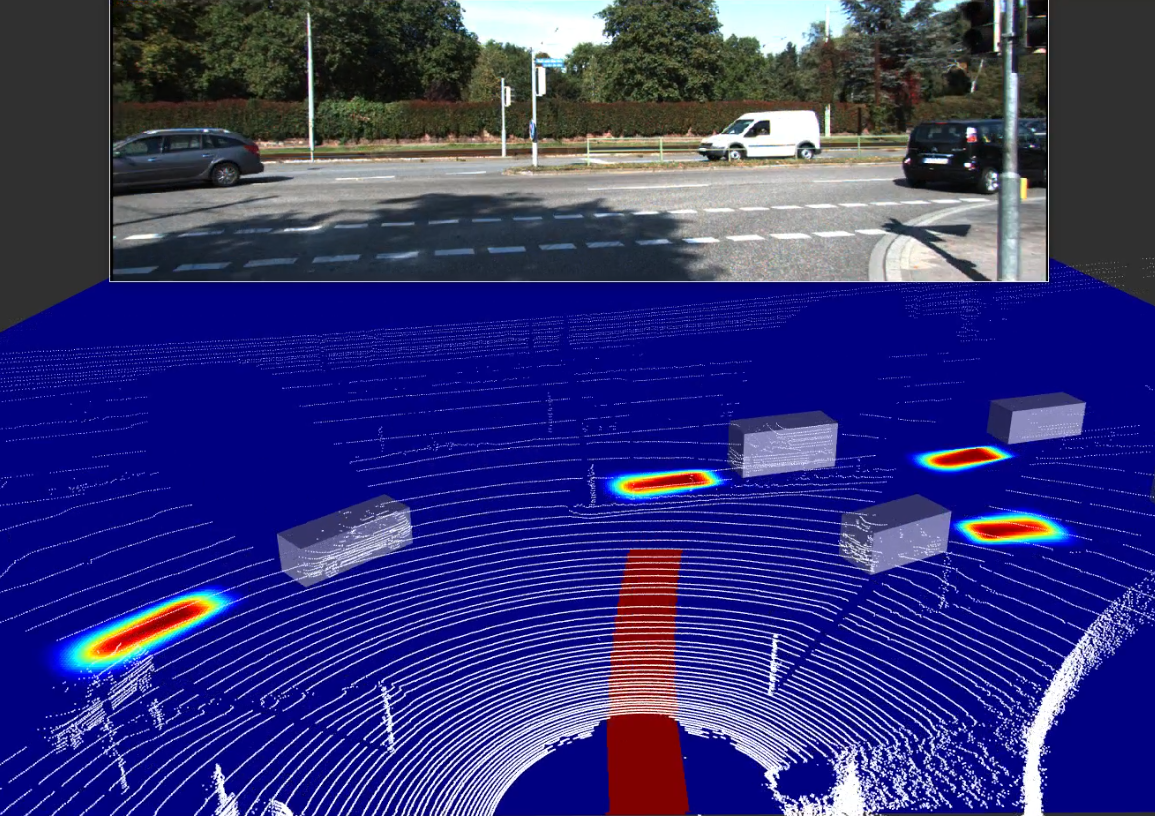
This is a new approach, based on stochastic models, to predict the future occupancy of vehicles and pedestrians. Our models only require tracked bounding box details and the class of the object from object detection method like Frustum-pointpillars, while uncertainties in sensing and prediction are captured within the stochastic nature of the models.
For more information, check out our paper: https://hal.inria.fr/hal-03416222


U. Patil, A. Renzaglia, A. Paigwar and C. Laugier, "Real-time Collision Risk Estimation based on Stochastic Reachability Spaces," 2021 20th International Conference on Advanced Robotics (ICAR), 2021, pp. 216-221, doi: 10.1109/ICAR53236.2021.9659485.