Visualize sensor_msgs/PointCloud2 messages (e.g., from a lidar sensor) projected onto images. Use pangolin GUI for fine-tuning of extrinsic sensor calibration. Inspired by the non-ROS sensor calibration toolbox, OpenCalib.
First install dependencies (e.g., sudo apt install ros-noetic-tf2-sensor-msgs) and build and source your ROS workspace.
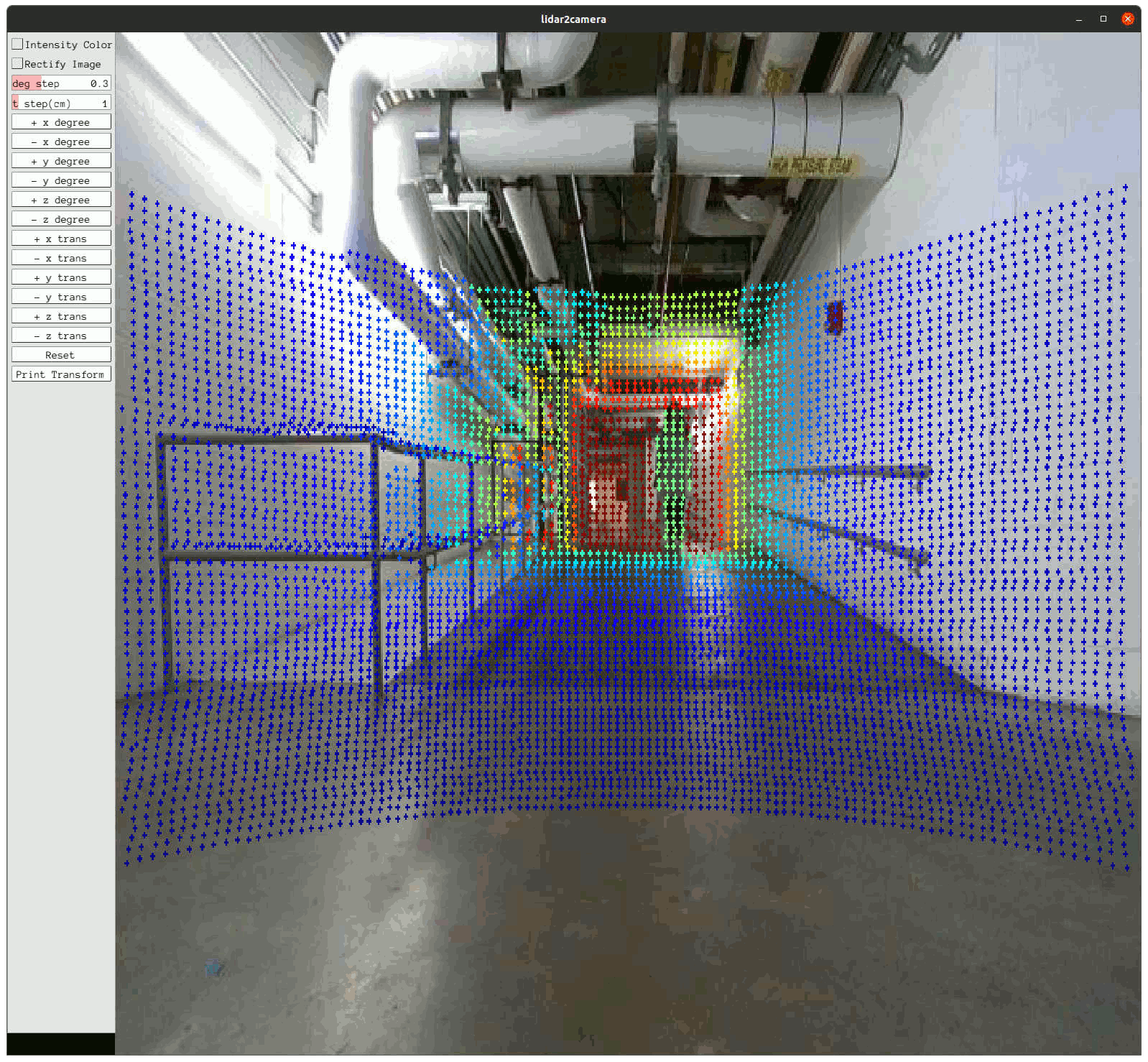
Run the manual calibration tool using
roslaunch lidar2camera manual_calib.launchNote that you may need to change the camera or points arguments to ensure proper topic remapping. Also note that this code assumes that image_raw, camera_info, and lidar_points topics are published and sufficiently time synchronized.
Replace the manual_calib.launch above with projection.launch to publish a topic called image_pts_raw with the lidar points projected onto the image.