Modified and maintained by: Prasanth Suresh (ps32611@uga.edu)
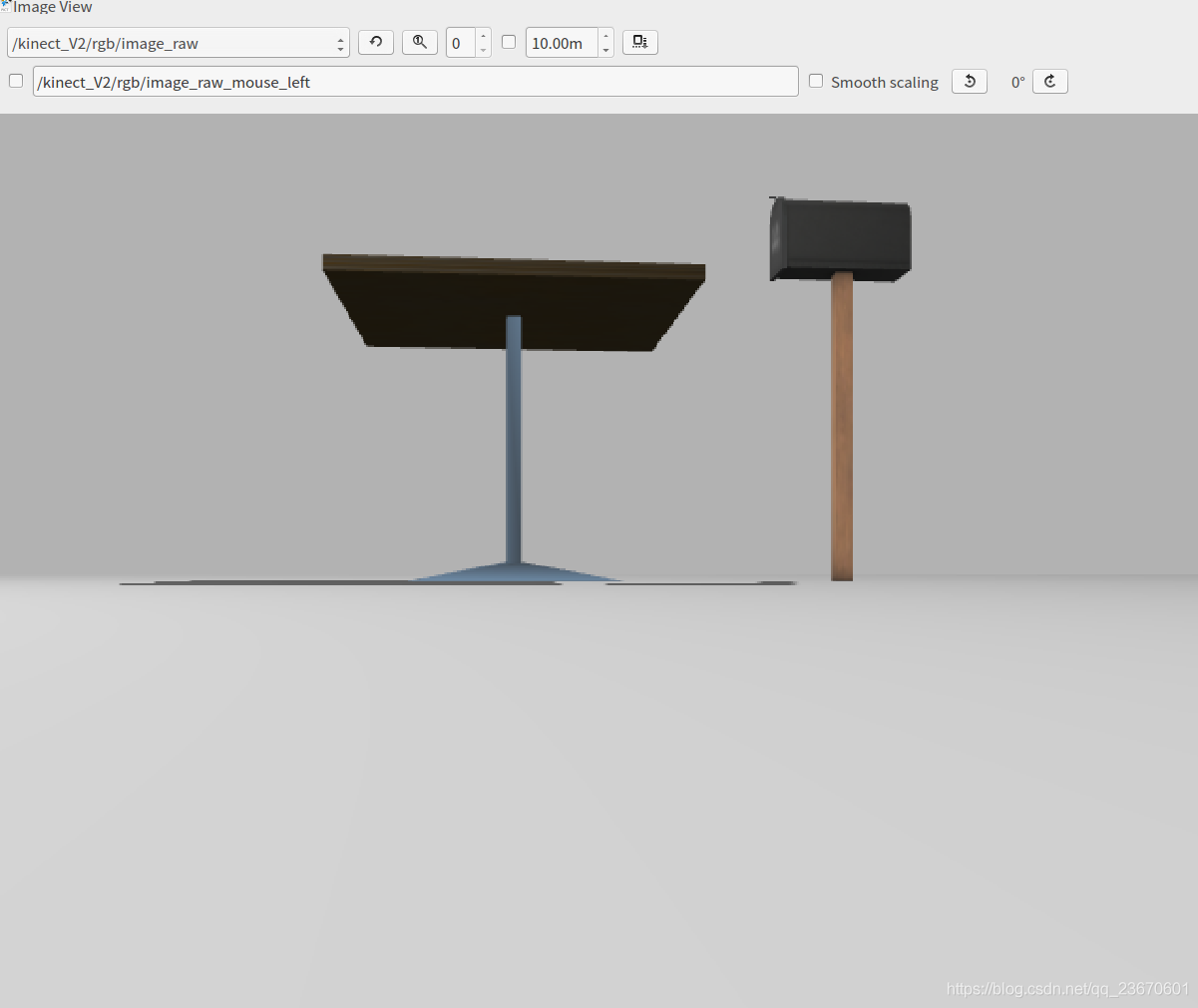
- This package contains URDF, gazbo and rviz support for Microsoft Kinect V2. This package also publishes static_transform for the camera location /tf wrt root. This can be modified by checking launch/gazbo.launch and urdf/kinect_v2_standalong.urdf.xacro.
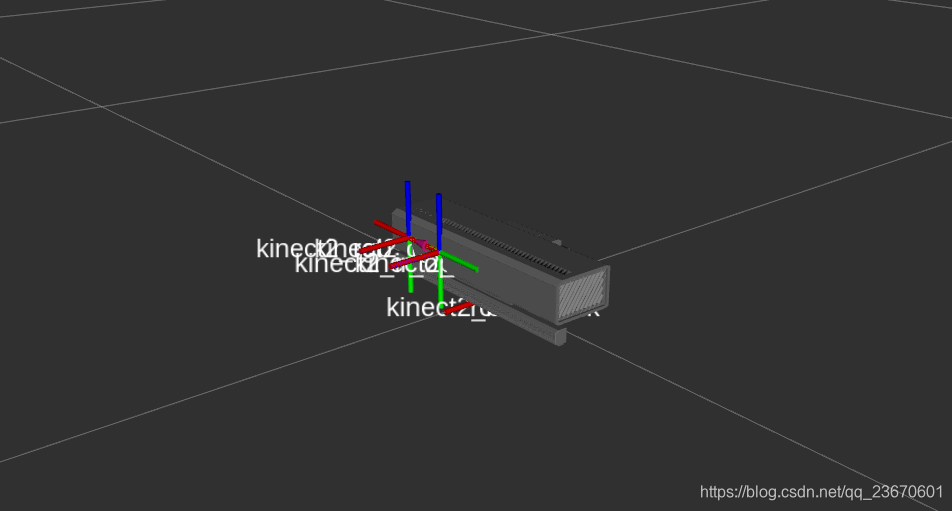
- To use in rviz:
roslaunch kinect_v2 display.launch
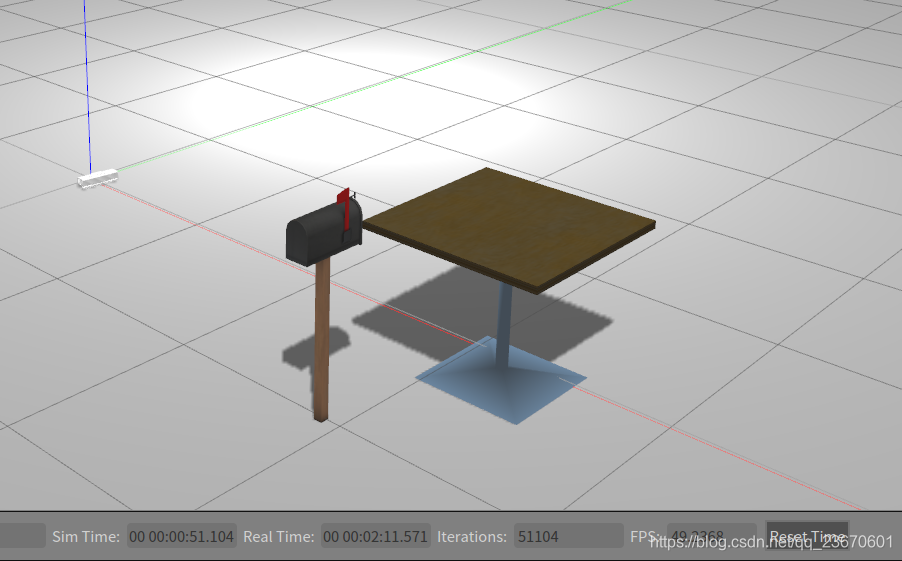
- To use in Gazebo:
roslaunch kinect_v2 gazebo.launch