- Distributed Consider EKF for a 4 Cubesat Formation w/ Deputies having Relative Range Meas. and a Chief with GPS Meas. - Includes Dynamics with Gravity,J2 Perturbations and Spacecraft Drag with an Exponential Atmosphere model.
- Event-Trigger variant of the Proposed Distributed Filter for Sensor Selection and Communication Channel Optimization based on the Crámer-Rao Lower Bound and proportional Confidence Levels, that the user defines to balance the ratio between accuracy and communication optimization.
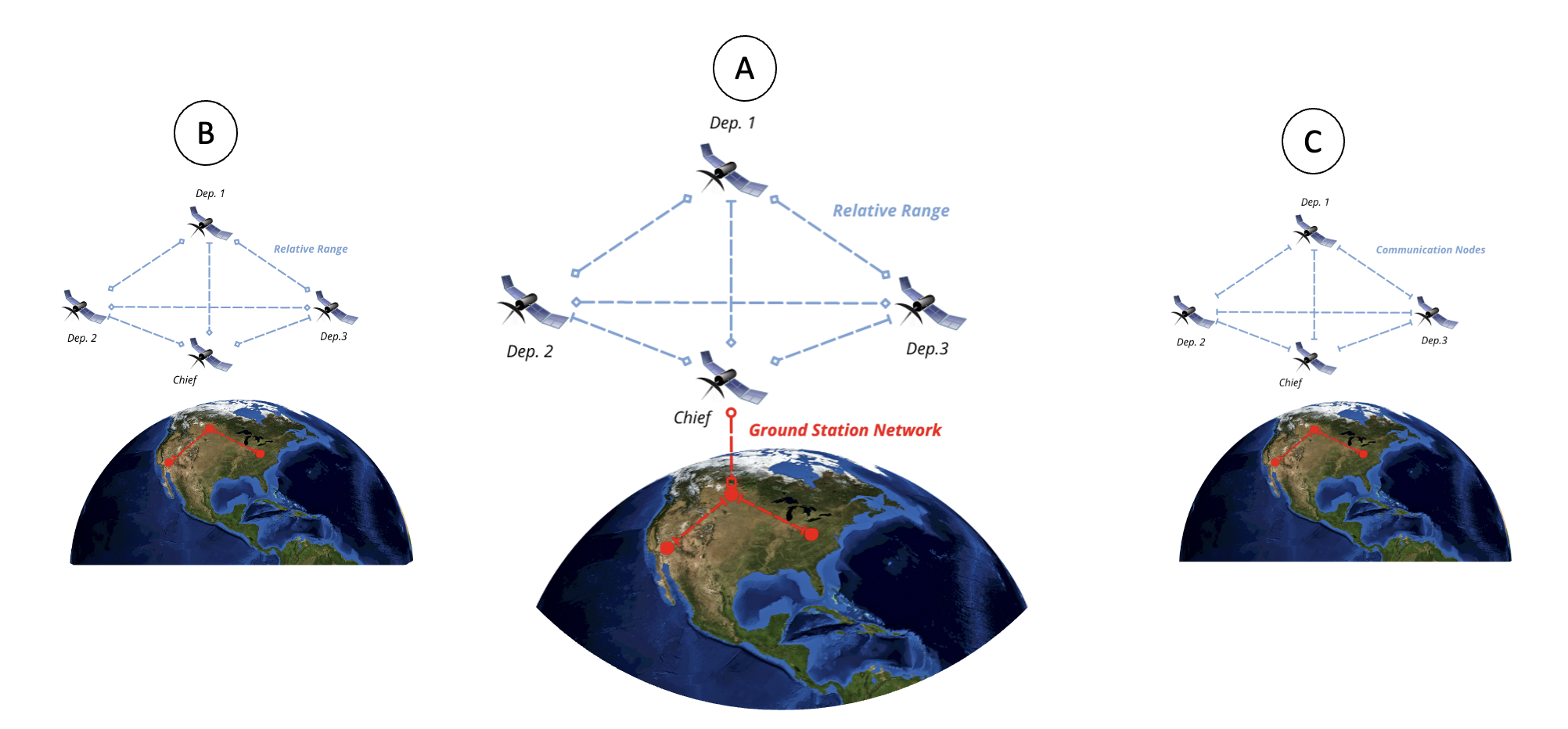
- Satellite formation orbiting Earth in the different stages : (A) - Formation has both relative sensing between every satellite taken by each deputy and GPS measurements from the chief; (B) - Only relative-range being used by deputies; (C) - No measurements are being actuated and the formation graph only contains communication nodes between spacecraft.
- The Dynamics Model is made by the author w/ J2 and Drag ➡️ Model includes also the jacobians;
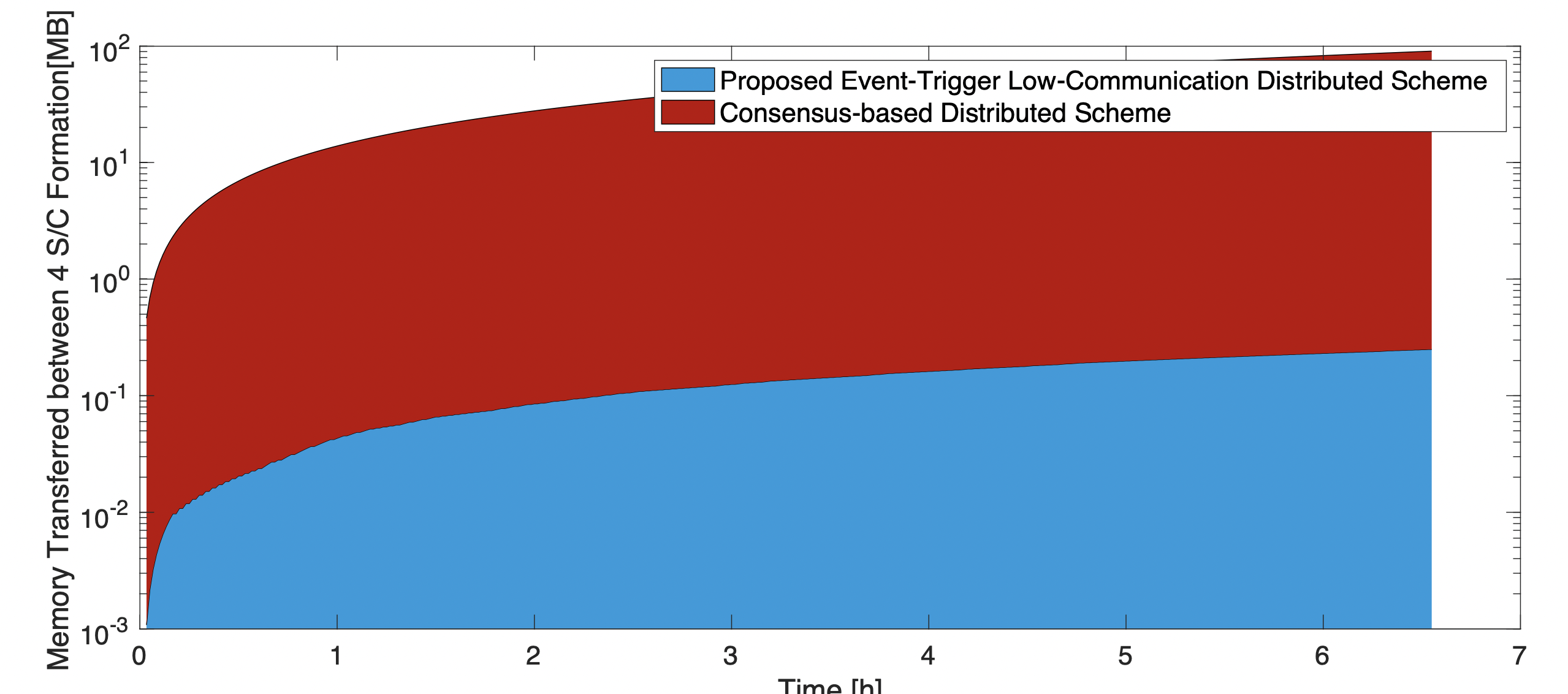
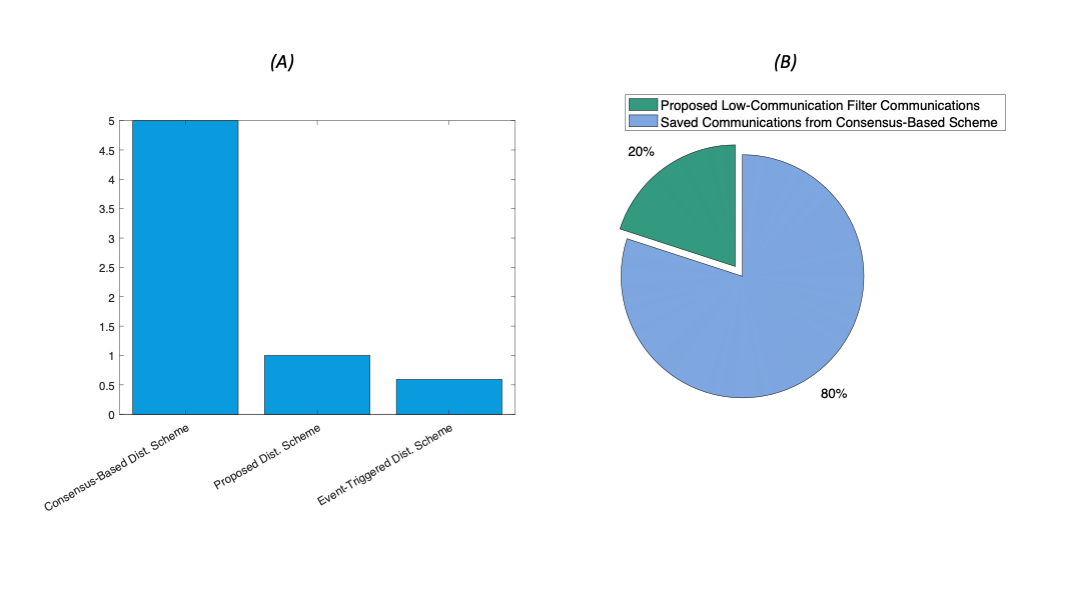
- Proposed Distributed Framework is easy to use and has, through testing with CubeSats from the SpaceX Transporter-1 mission, less memory transferred by factor of 1000 when compared to the current literature of distributed systems and 80% less sensor activations that the literature consensus-based distributed frameworks;
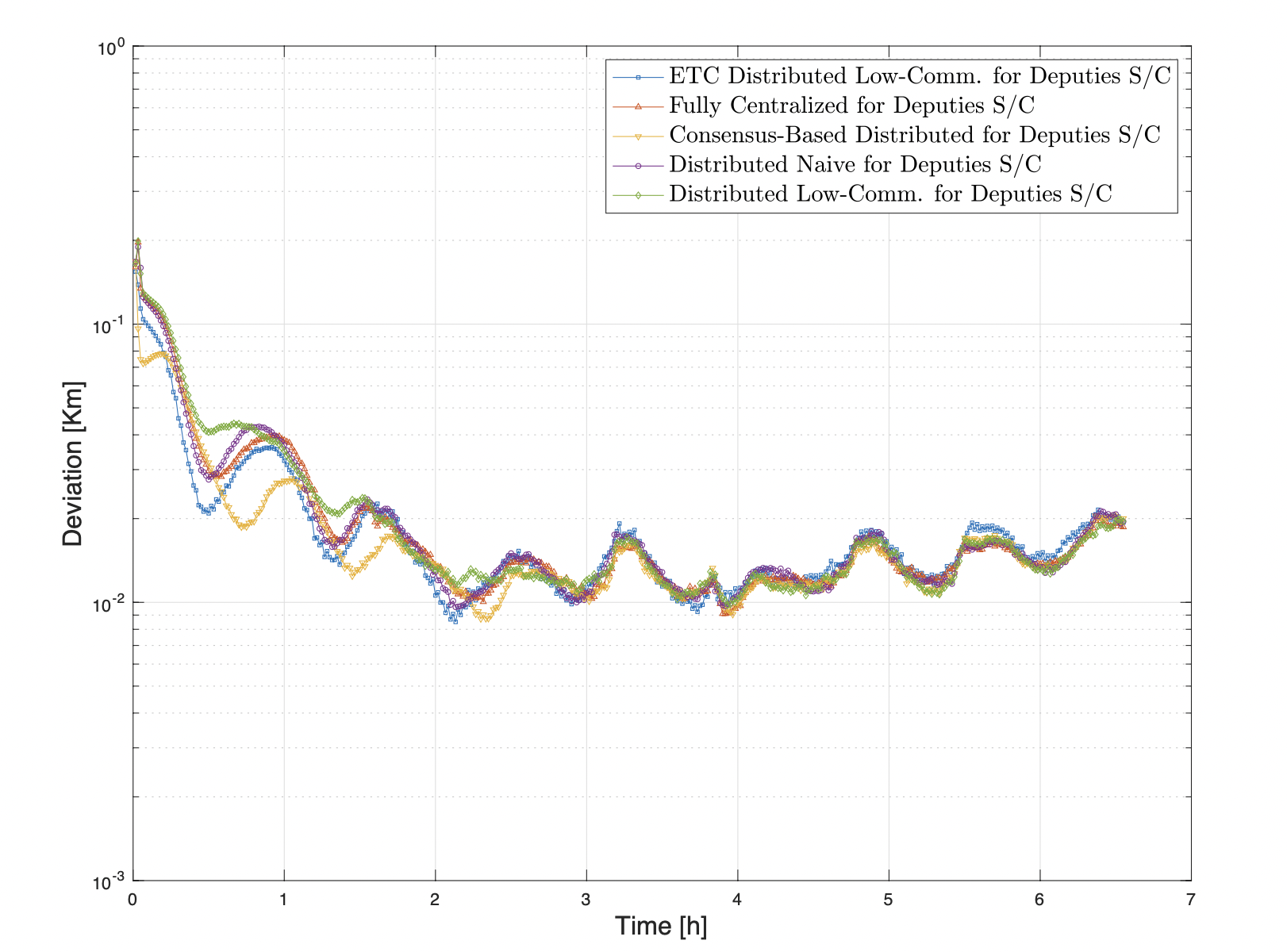
- All of this with on-par position error levels with the current literature alternatives in the V-R3x mission problem setting;
- This work was made by a collaborative effort from the Robotic Exploration Lab at Carnegie-Mellon University and the Institute for Systems and Robotics at Instituto Superiro Técnico;
