(Niryo One : https://niryo.com)

This repository contains all ROS packages used on Niryo One (Raspberry Pi 3 - Xubuntu for ARM).
You can download Niryo One Studio (Linux, Windows and MacOS compatible).
Requirements :
- Ubuntu 16.04
- ROS kinetic (other versions are not supported)
First install ROS kinetic "Desktop-Full" (tutorial here).
You'll need to install some additional ROS packages :
sudo apt-get install ros-kinetic-robot-state-publisher ros-kinetic-moveit ros-kinetic-manipulation-msgs ros-kinetic-rosbridge-suite ros-kinetic-joy ros-kinetic-ros-control ros-kinetic-ros-controllers ros-kinetic-tf2-web-republisher
Create a catkin workspace and clone Niryo One ROS stack :
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/NiryoRobotics/niryo_one_ros.git .
Build the packages :
cd ~/catkin_ws
catkin_make
Don't forget to use those commands before you try to launch anything (you can add them in your .bashrc) :
source /opt/ros/kinetic/setup.bash
source ~/catkin_ws/devel/setup.bash
You can now launch Rviz with Niryo One (only display mode with some cursors to move the joints):
roslaunch niryo_one_description display.launch
You can also launch the complete Niryo One ROS Stack instead, which you can control from Niryo One Studio.
roslaunch niryo_one_bringup desktop_rviz_simulation.launch
The main differences between this launch file and the launch file executed on Raspberry Pi 3 (rpi_setup.launch) is that the hardware functionalities are disabled, and you get a 3D simulation view with Rviz.
Note that Niryo One ROS packages have been developed with ROS kinetic, on Ubuntu 16.04. Other ROS versions and OS distributions are not supported.
Here's a global overview of the Niryo One ROS Stack :
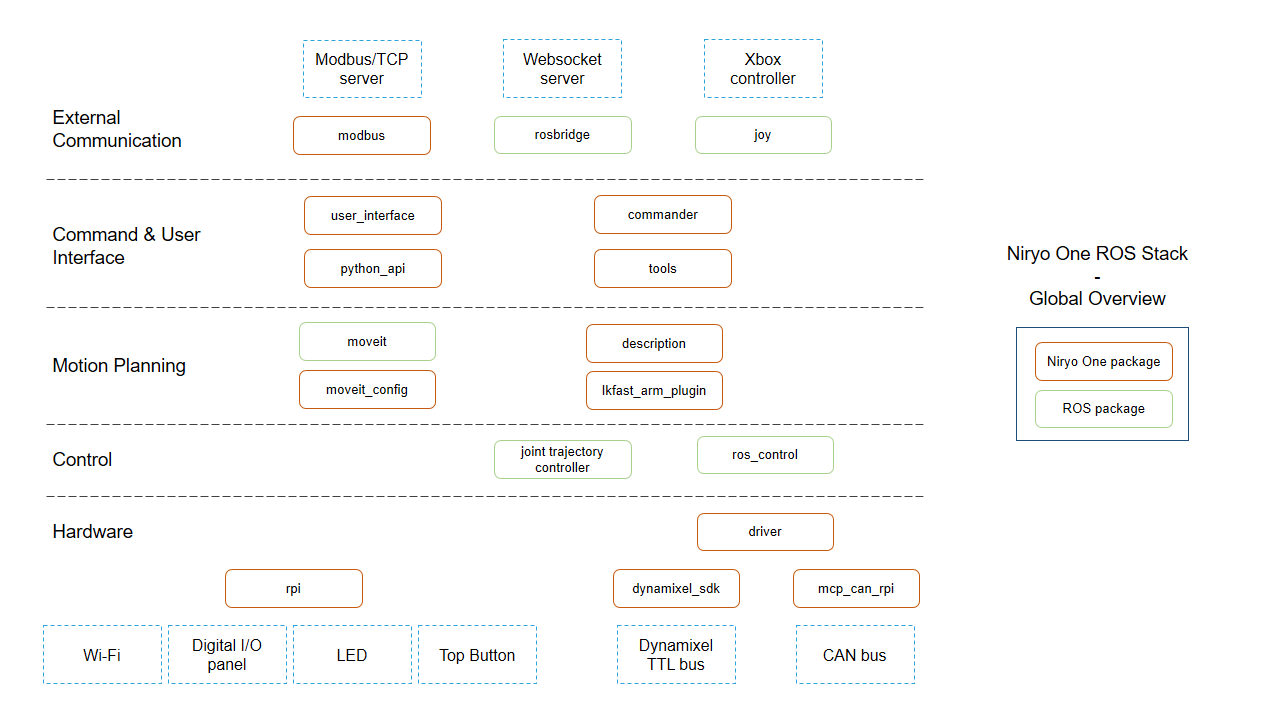
You can find more specific and detailed info in each package's README.
The documentation is not complete yet and will be updated over time.
- C++ example to move the robot by Steve Maassen
- Python API
If you have a question and you don't find the answer here or on our FAQ page, please send us an email at support@niryo.com.
Thank you !