Authors: Parker Lusk and Jesus Tordesillas
This repo has the code implemented for the project of Underactuated Robotics (6.832) at MIT. The pdf is available here.
@techreport{luskjtorde2019,
title = {{Trajectory Optimization for Multirotors}},
author = {Parker Lusk and Jesus Tordesillas},
year = {2019},
url = {https://github.com/jtorde/uav_trajectory_optimizer_gurobi},
institution = {Aerospace Controls Lab},
month = {05}
}
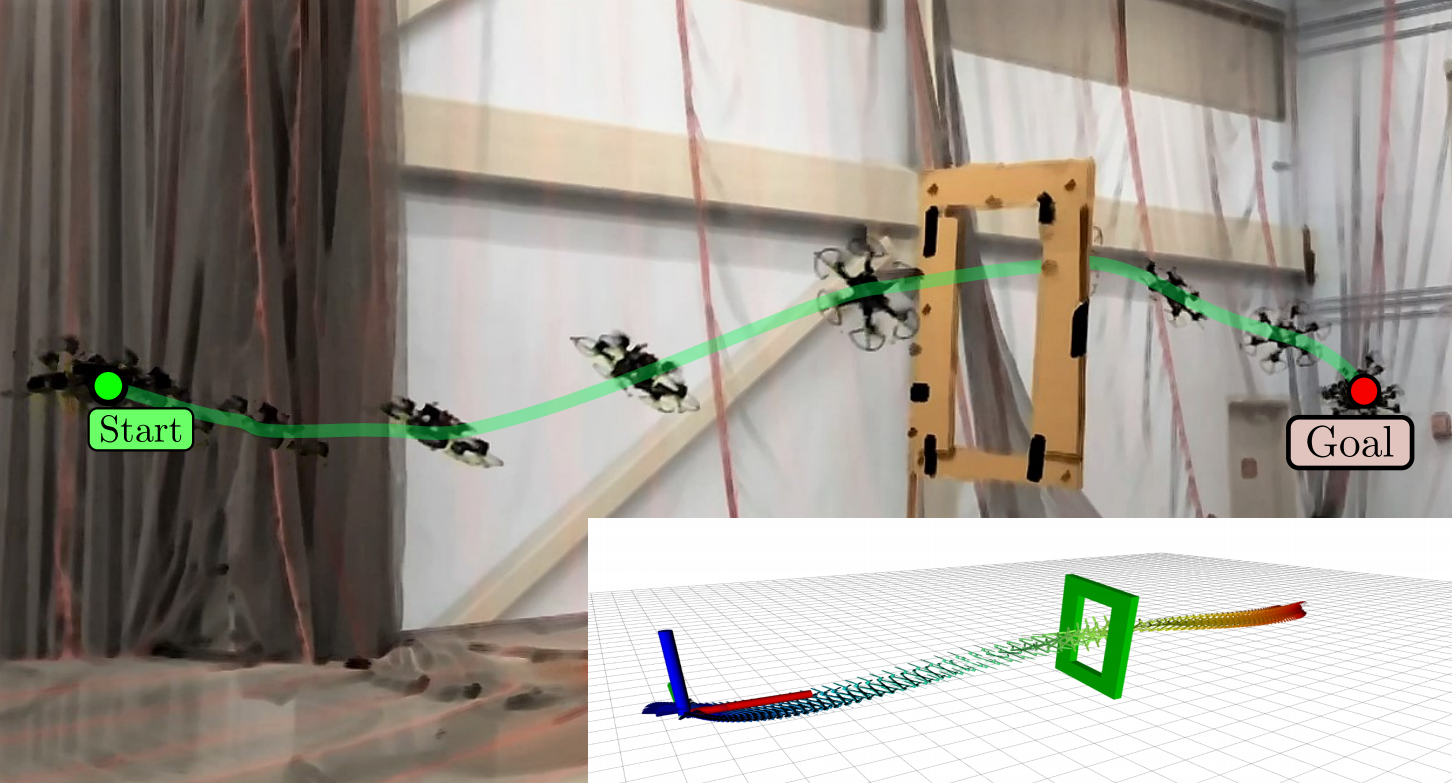
It uses an integrator model of any order, and solves the optimal control problem to minimize the input squared. The order of the input is specified by the user (Acceleration, Jerk, Snap, Crackle,... ). Additional position and/or attitude constraints can be specified along the trajectory.
| Flip in roll | Flip in pitch | Flip in roll with translation | Half-flip with translation |
|---|---|---|---|
 |
 |
 |
A video of the simulation and hardware experiments is available here:
Install Gurobi
Clone this repository:
mkdir ws && cd ws && mkdir src && cd src
git clone https://github.com/jtorde/uav_trajectory_optimizer_gurobi.git
Source the workspace:
cd ..
catkin build
source ./devel/setup.bash
Run the ROS node:
roscore
rosrun project flipper.py __ns:=SQ01s
Open Rviz and then call one of these services:
rosservice call /SQ01s/line #Straight line
rosservice call /SQ01s/flip #Flip in roll
rosservice call /SQ01s/flip_pitch #Flip in pitch
rosservice call /SQ01s/flip_trans #Flip in roll with translation
rosservice call /SQ01s/window #Half-flip with translation
This code can also be used with an external simulation, or run onboard a real UAV.
Academic license - for non-commercial use only