Client base code #vss #LARC #ssl-vision #FiraSim
This repository was created for the purpose of RoboCin selection program. This project is capable of:
- receive field and robot information from FiraSim
- Send commands to robots on grSim
Almost every material present here can be found at:
Feel free to ask and contribute too :)
Tested with: Qt 5.8.0, protoc 3.x, Ubuntu 20.04 LTS.
- If you have protobuf installed, check which version you use with the command:
protoc --version-
If you do not , follow the instructions in C++ Installation - Unix.
-
According to its version download the referent in protobuf/tags.
-
Extract the downloaded file and go to
/protobuf-3.6.1/src/(example version). -
Copy the google folder and paste it into
/ssl-Client/net -
Go to folder
/ssl-Client/net/pb/proto/and run:
sh compile.shObs: when building the program, if something referring to google/protobuf/stubs/common.h has any errors, it will probably be an incompatibility version problem with protobuf (net/google).
-
Open the FiraSim.
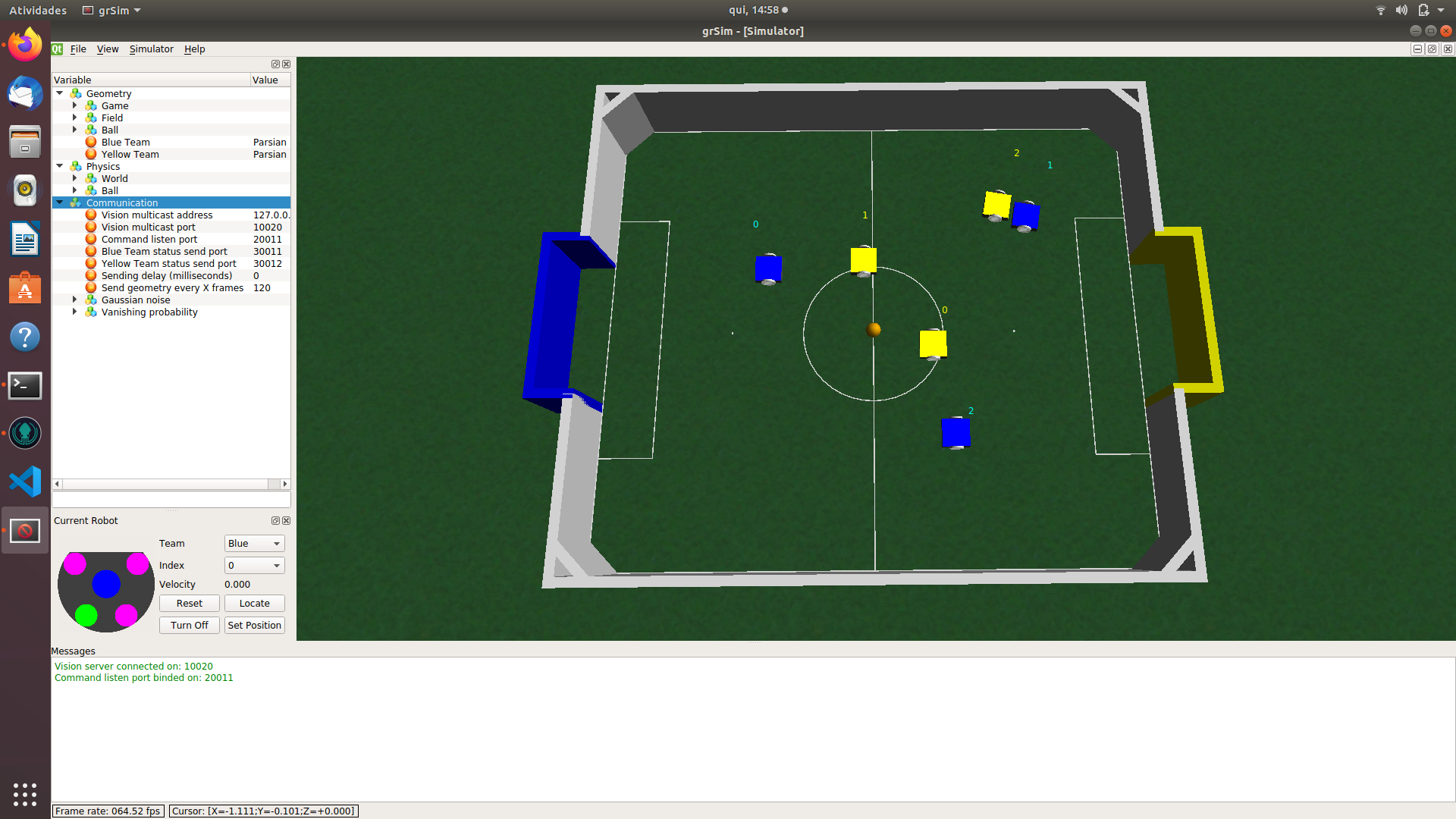
-
Get the Vision multicast adress, Vision multicast port and Command listen port on grSim.
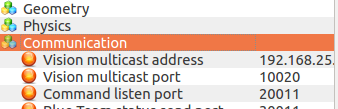
-
Go to
/ssl-Client/main.cppand paste the Vision Multicast adress and the Vision Multicast port onvisionClienteinitialization.
-
Go to
/ssl-Client/main.cppand paste the Vision Multicast adress and the Command listen port oncommandClienteinitialization.
-
Fill the function defineObjective with the code to define an objective to each robot.
-
Run the file compile.sh to compile the code.
-
Run the bin main.



