The objective is to make a remote control robot capable of balancing itself using Linear Quadratic Regulator (LQR) Control.
- Arduino Mega
- MPU 6050 (Accelerometer + Gyroscope)
- DC Motors with quadrature encoders
- Xbee Module
- Motor Driver (L298N)
- 12V Lipo Battery
- Chassis
- Breadboard
- Wheels
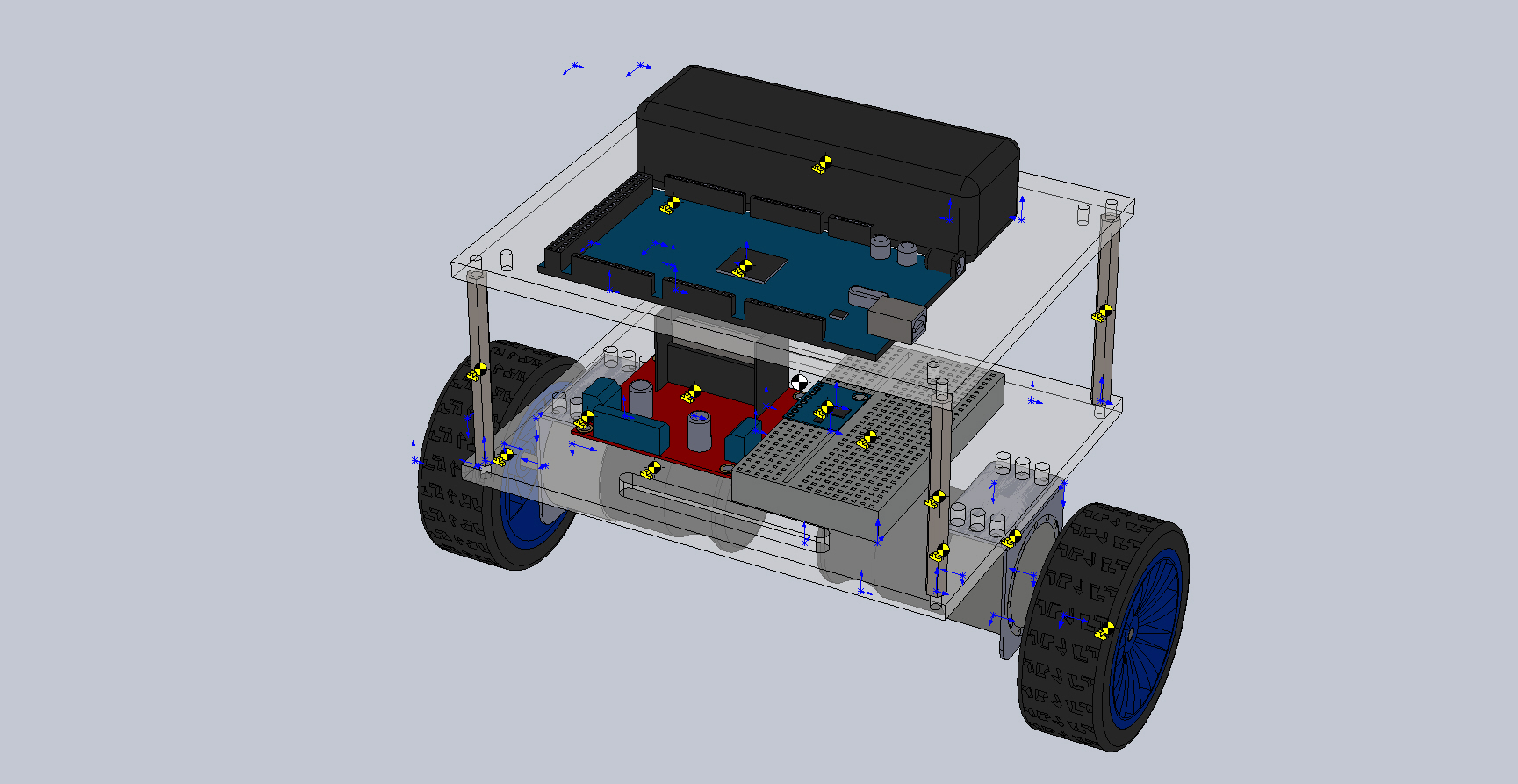
- 3D Modelling of the robot is done in the solidworks, and those files are available in 3D Model folder.

-
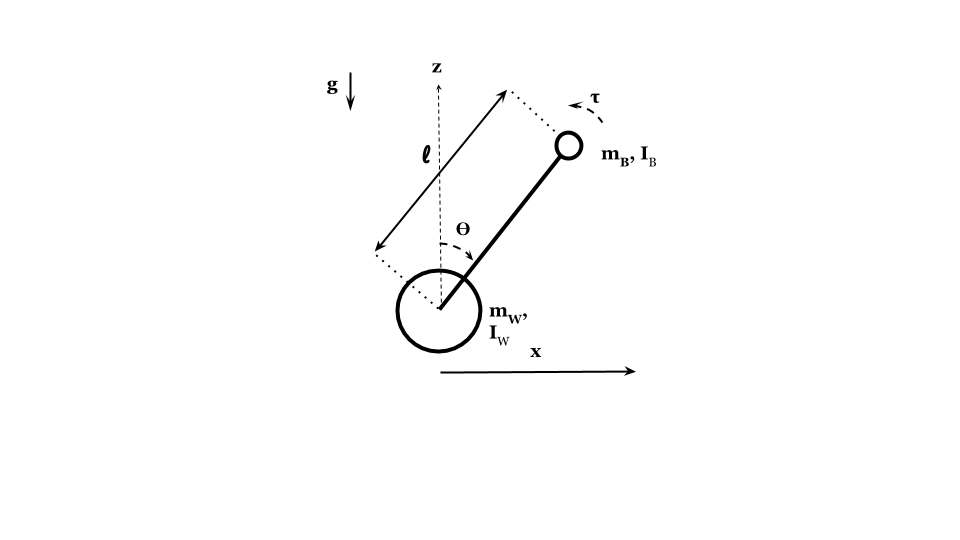
Derivations are given in the folder Mathematical Model.
-
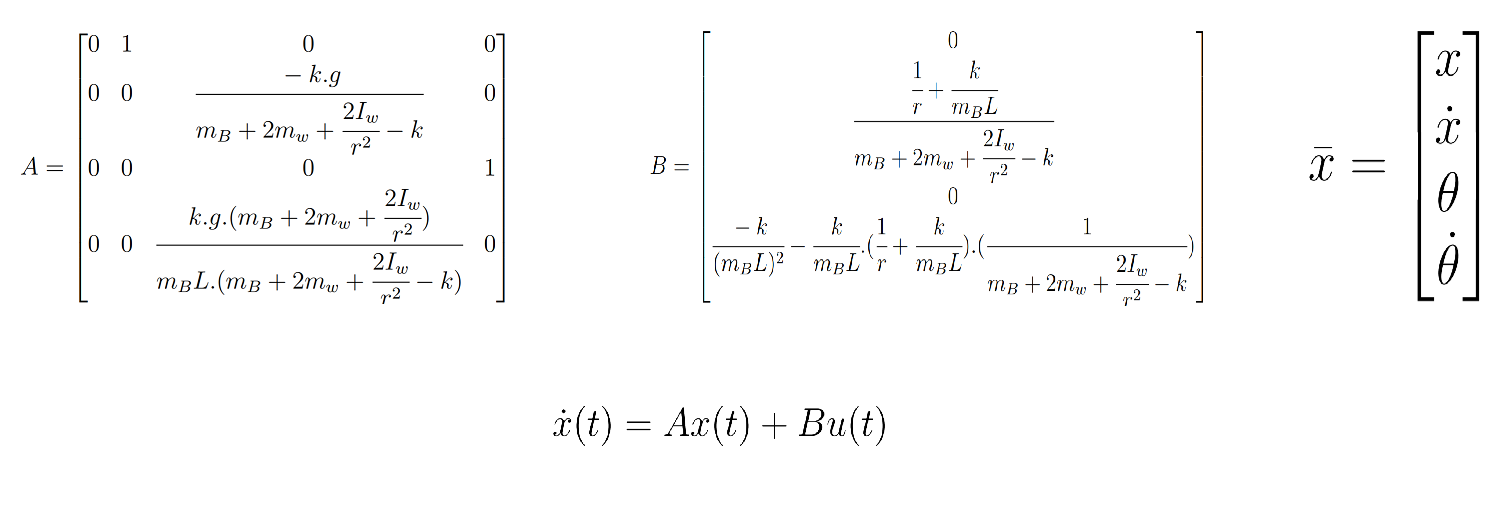
State-Space Equation



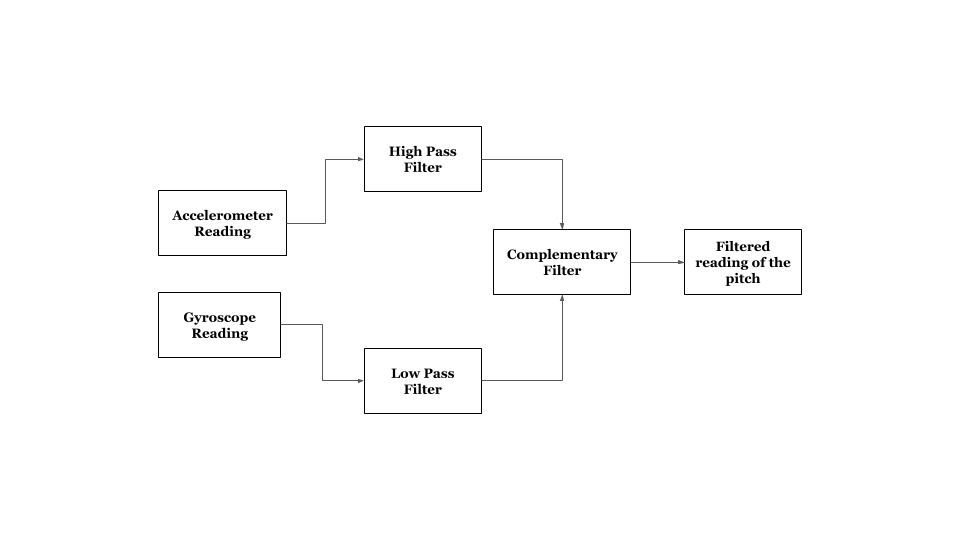
- Filter

- This is the file in which code for controlling Arduino Mega is written.
- In these files, class of encoders is defined.
- X4 encoding is used.
- In these files, class of motor is defined.
- Encoder is a inner class of motor.
- Timers 3, 4, and 5 are initialized in this library.
- In this files, class of Xbee is defined.
- In this files, dicrete state-space model of robot is calculated from its continuous state-space model.
- State variables are simulated from given Q and R matrix.
-
Arduino IDE
- digitalWriteFast.h
- MPU6050
- MPULib
- I2C
- I2Cdev
-
Octave
- "control" package