This is the official implementation of our paper:
Bowen Wen, Wenzhao Lian, Kostas Bekris, and Stefan Schaal. "CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation." IEEE International Conference on Robotics and Automation (ICRA) 2022.



Task-relevant grasping is critical for industrial assembly, where downstream manipulation tasks constrain the set of valid grasps. Learning how to perform this task, however, is challenging, since task-relevant grasp labels are hard to define and annotate. There is also yet no consensus on proper representations for modeling or off-the-shelf tools for performing task-relevant grasps. This work proposes a framework to learn task-relevant grasping for industrial objects without the need of time-consuming real-world data collection or manual annotation. To achieve this, the entire framework is trained solely in simulation, including supervised training with synthetic label generation and self-supervised, hand-object interaction. In the context of this framework, this paper proposes a novel, object-centric canonical representation at the category level, which allows establishing dense correspondence across object instances and transferring task-relevant grasps to novel instances. Extensive experiments on task-relevant grasping of densely-cluttered industrial objects are conducted in both simulation and real-world setups, demonstrating the effectiveness of the proposed framework.
@article{wen2021catgrasp,
title={CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation},
author={Wen, Bowen and Lian, Wenzhao and Bekris, Kostas and Schaal, Stefan},
journal={ICRA 2022},
year={2022}
}Click to watch
We provide docker environment and setup is as easy as below a few lines.
-
If you haven't installed docker, firstly install (https://docs.docker.com/get-docker/).
-
Run
docker pull wenbowen123/catgrasp:latest -
To enter the docker, run below
cd docker && bash run_container.sh cd /home/catgrasp && bash build.shNow the environment is ready to run training or testing. Later you can re-enter the lauched docker environment without re-compilation by:
docker exec -it catgrasp bash
- Download object models and pretrained network weights from here. Then extract and replace the files in this repo, to be like:
catgrasp
├── artifacts
├── data
└── urdf
python run_grasp_simulation.py
You should see the demo starting like below. You can play with the settings in config_run.yml, including changing different object instances within the category while using the same framework

In the following, we take the nut category as an example to walk through
-
Compute signed distance function for all objects of the category
python make_sdf.py --class_name nut -
Pre-compute offline grasps of training objects. This generates and evaluates grasp qualities regardless of their task-relevance. To visualize and debug the grasp quality evaluation change to
--debug 1python generate_grasp.py --class_name nut --debug 0 -
Self-supervised task-relevance discovery in simulation
python pybullet_env/env_semantic_grasp.py --class_name nut --debug 0Changing
--debug 0to--debug 1, you are able to debug and visualize the process
The affordance results will be saved in
data/object_models. The heatmap fileXXX_affordance_viscan be visualized as in the below image, where warmer area means higher task-relevant grasping region P(T|G)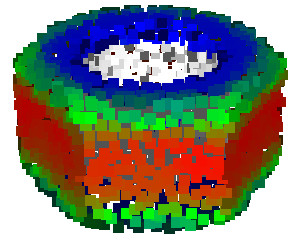
-
Make the canonical model that stores category-level knowledge
python make_canonical.py --class_name nut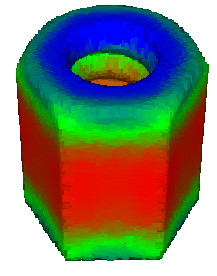
-
Training data generation of piles
python generate_pile_data.py --class_name nut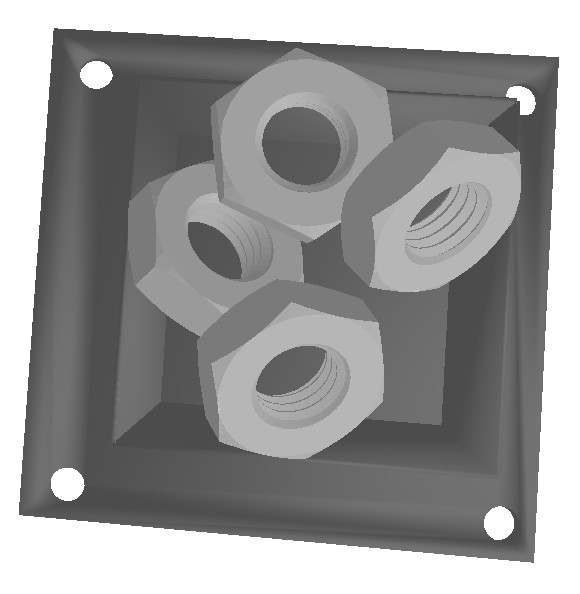
-
Process training data, including generating ground-truth labels
python tool.py -
To train NUNOCS net, examine the settings in
config_nunocs.yml, thenpython train_nunocs.py -
To train grasping-Q net, examine the settings in
config_grasp.yml, thenpython train_grasp.py -
To train instance segmentation net, examine the settings in
PointGroup/config/config_pointgroup.yaml, thenpython train_pointgroup.py



