This code is run on an ESP32 with Bluetooth, WiFi and a GPIO-interfaced camera to enable remote control of a LEGO Mindstorms robot.
The code is written for and built using the Espresif development framework and tools and not the higher-level Arduino environment.
The project needs to be configured before building such that the code knows the local WiFi credentials and the Bluetooth SSP name of the robot ot control.
WiFi Configuration
- ssid
- password
- retries
Bluetooth Configuration
- name
The code is built and flashed to the board using the idf.py tool.
idf.py --port COM9 menuconfig build flash
The esp32-cam board only needs 5v power and ground connections at run-time. The code configures the camera to flip and rotate the image so the board needs to be on the robot as shown.
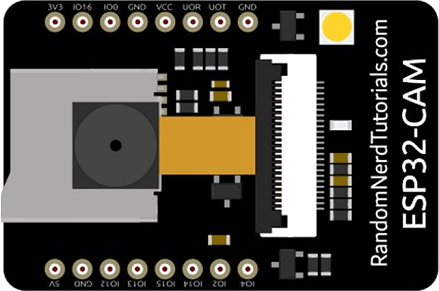
Image credit to Random Nerd Tutorials.
The code runs on the ESP32 to provide a web interface with streaming video and a joystick/pad to control the robot's drive motors.
The device works as a bridge between the Internet user/browser and the LEGO Mindstorms robot. Interactins with the bridge are in terms of its REST interfaces. The interfaces are documented in the openapi.yaml file using the OpenAPI format.
- rework the project configuration
- rework the WiFi initialization
- clean up the camera code
- integrate the Bluetooth code
- integrate the robot interface code
- add activity LED
- limit client access to ensure responsiveness
- fix disconnect/reconnect WiFi behavior