
- ROS package for KUKA LBR iiwa 14 R820 tutorial.
- Docker for simulation and control environments for KUKA LBR iiwa 14 R820.
- Ubuntu 22.04 PC
- Docker 26.1.1
- Docker Compose 2.27.0
- Follow iiwa_stack wiki to setup a package with Sunrise Workbench
- Connect an Ethernet cable between the host computer and the Ethernet port of controller

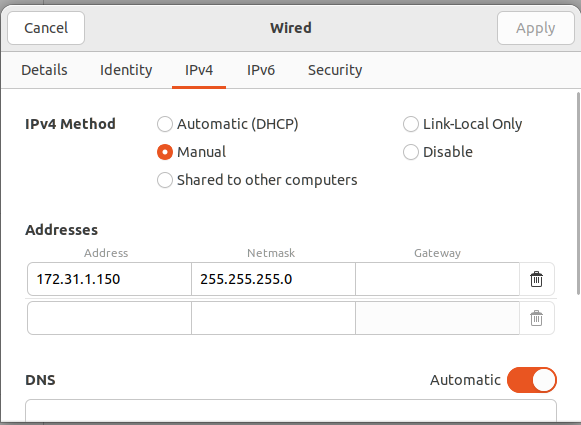
- Set the network configuration as below
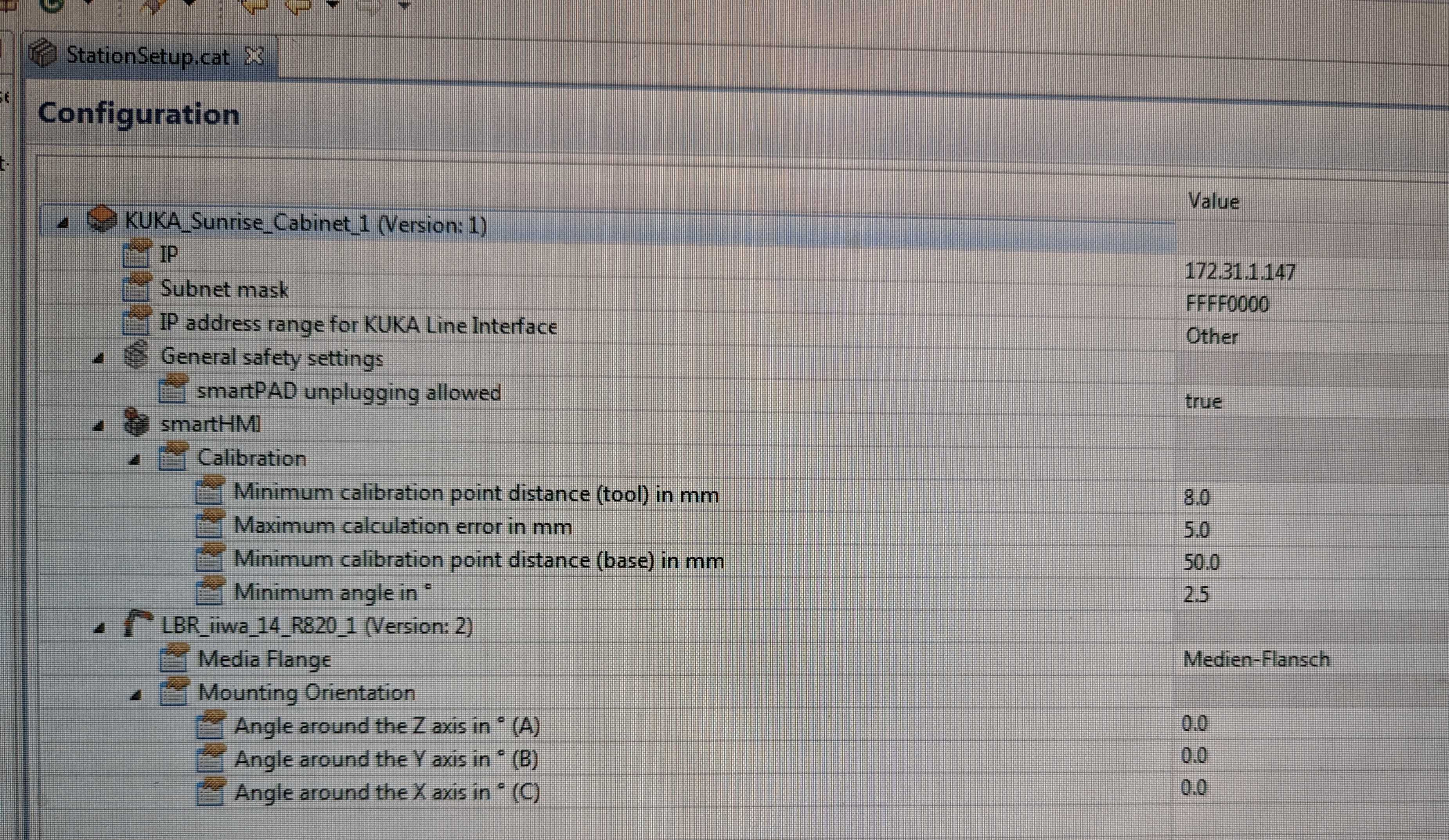
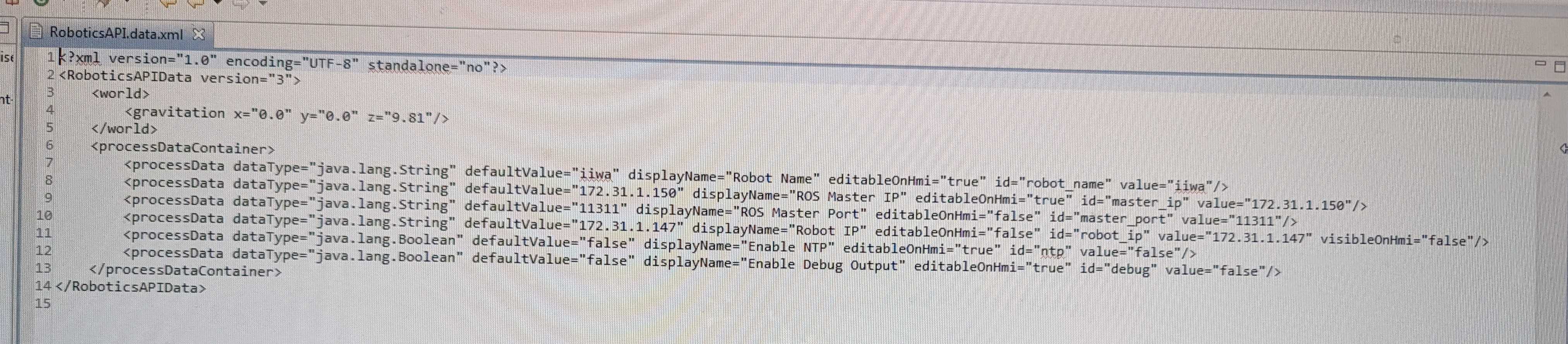
- The ros node expects to reach the robot at the IP
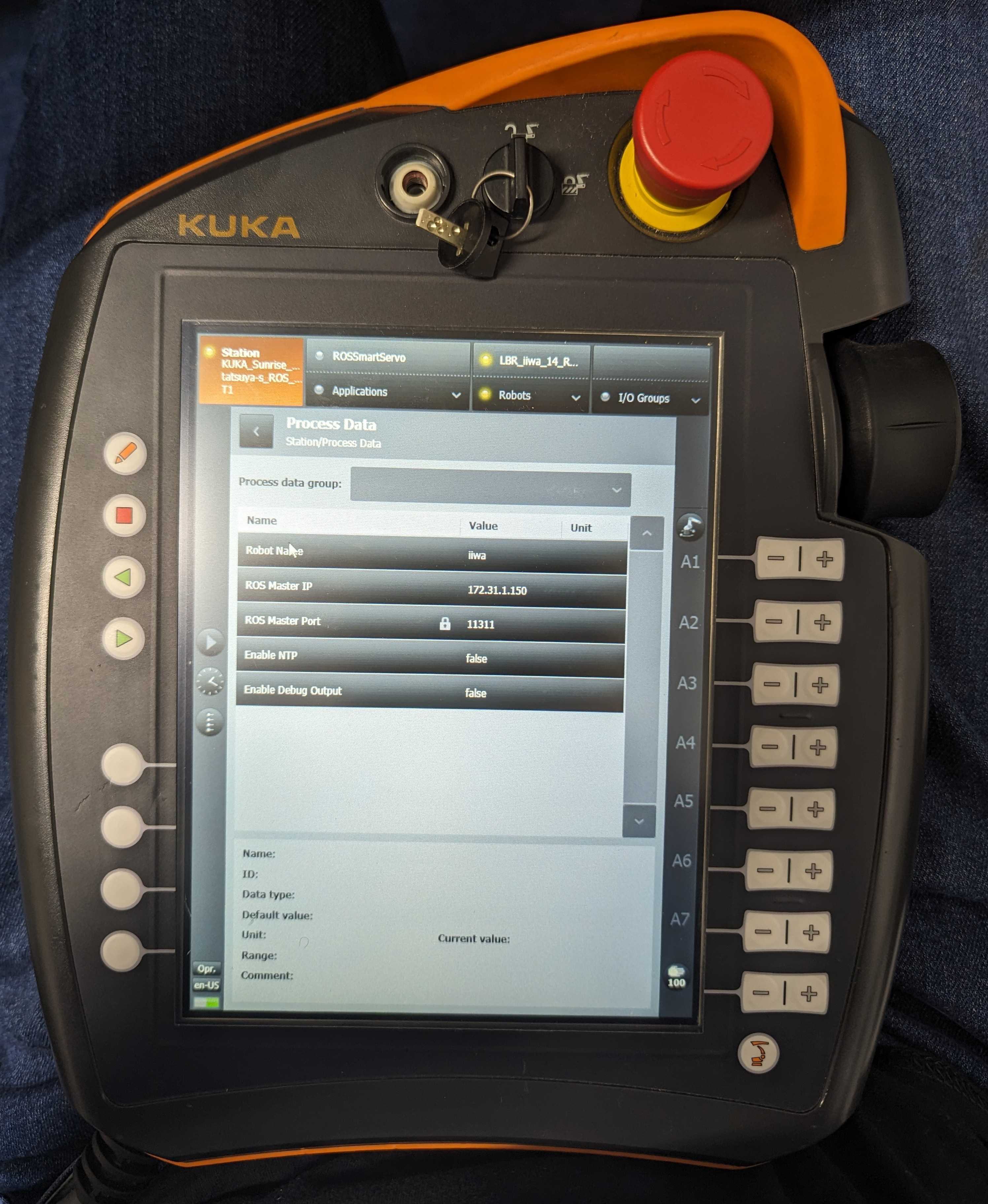
172.31.1.147 - The ROS nodes on the robot side expects to reach the ROS master at the IP
172.31.1.150 - This is set with the pendant as below
- The ROS_IP and ROS_MASTER_URI must be set as below in .bashrc

- The ros node expects to reach the robot at the IP
- Build the docker environment as below (if you use the docker, this must be set in docker container)
sudo apt install byobu && git clone git@github.com:takuya-ki/iiwa_tutorials.git --depth 1 && cd iiwa_tutorials && COMPOSE_DOCKER_CLI_BUILD=1 DOCKER_BUILDKIT=1 docker compose build --no-cache --parallel






- Build and run the docker environment
- Create and start docker containers in the initially opened terminal
docker compose up
roscoreon the host machine or in the docker container
- This application requires having a ROS Master running on the ROS machine connected to the cabinet. (iiwa_stack wiki)
- Run a demonstration on the host machine
- Executing a pick-and-place demonstration
./utils/iiwa_pp_fake.sh
- Initialize the eef pose
initialize
- Demonstrate pick-and-place of a object
pp
- Initialize the eef pose
- Run the application ROSSmartServo on the KUKA Smartpad
- Run a demonstration on the host machine
-
Testing the moveit with GUI
xhost + && docker exec -it iiwa_container bash -it -c "roslaunch iiwa_tool_moveit moveit_planning_execution.launch sim:=false"
-
Executing a wiggle demonstration
xhost + && docker exec -it iiwa_container bash -it -c "rosrun iiwa_tutorials wiggle"

-
Executing a repetitive motion
xhost + && docker exec -it iiwa_container bash -it -c "rosrun iiwa_tutorials sendmotion_loop"
-
Executing a repetitive linear motion
xhost + && docker exec -it iiwa_container bash -it -c "rosrun iiwa_tutorials sendmotion_loop_lin"
-
Executing a repetitive motion with ROS Action
xhost + && docker exec -it iiwa_container bash -it -c "rosrun iiwa_tutorials sendmotion_loop_action"
-
Executing a pick-and-place demonstration
./utils/iiwa_pp.sh
- Initialize the eef pose
initialize
- Demonstrate pick-and-place of a object
pp
- Initialize the eef pose




- Terminate the demonstration
- Stop the application ROSSmartServo on the pendant
- In the end, kill the roscore process if you need
- Build and run the docker environment
- Create and start docker containers in the initially opened terminal
docker compose up
- Execute the container in another terminal
xhost + && docker exec -it iiwa_container bash
- Run a demonstration in the container
byobu
- First command & F2 to create a new window & Second command ...
- Ctrl + F6 to close the selected window
We always welcome collaborators!
This software is released under the MIT License, see LICENSE.