Final Year Project for BEng Electronic and Information Engineering at Imperial College London. The thesis paper is here.
srcmultirobot_control: Package containing source files, world files, and launch files. This will be where everything is launched from.multirobot_control: Source files containing the implementation of all things coded in this project.launch: Source files containing what is needed to launch a simulation run.params: Files defining the different scenarios and the parameters for each of them.worlds: Where the simulation worlds are defined. The simulation is built aroundfactory_world2.
planner_action_interfaces: Custom ROS2 messages, services and actions defined for the purposes of this projectrobot_base: URDFs source files for the robot.
doc: Pictures required for the report.evaluation: Code to auto test the algorithms inside the simulation.todo.mdis a changelog and left to show the progress of this project.
- Gazebo 11
- ROS2 Galactic
pyyaml
Do install these before attempting to run anything in this project.
The pathing for this project is hard-coded to my machine. After cloning this repo, I recommend going through it with an editor like VS Code and searching for the string /home/tianyilim/fyp/ic-fyp and replacing it with whatever file path you have cloned this directory in.
Future instructions will assume the base directory of this repo to be $WORKSPACE.
To build the project, cd $WORKSPACE and run colcon build. This builds the project in the ROS build system.
In another terminal, cd $WORKSPACE and run source install/setup.bash, which associates the built files with the ROS launch system.
To view robots running around, run ros2 launch multirobot_control spawn_bots.launch.py. This will prompt you to choose one of three scenarios:
- Single robot scenario
- Robot swap scenario
- Randomized scenario.
The source files for each of them are located in
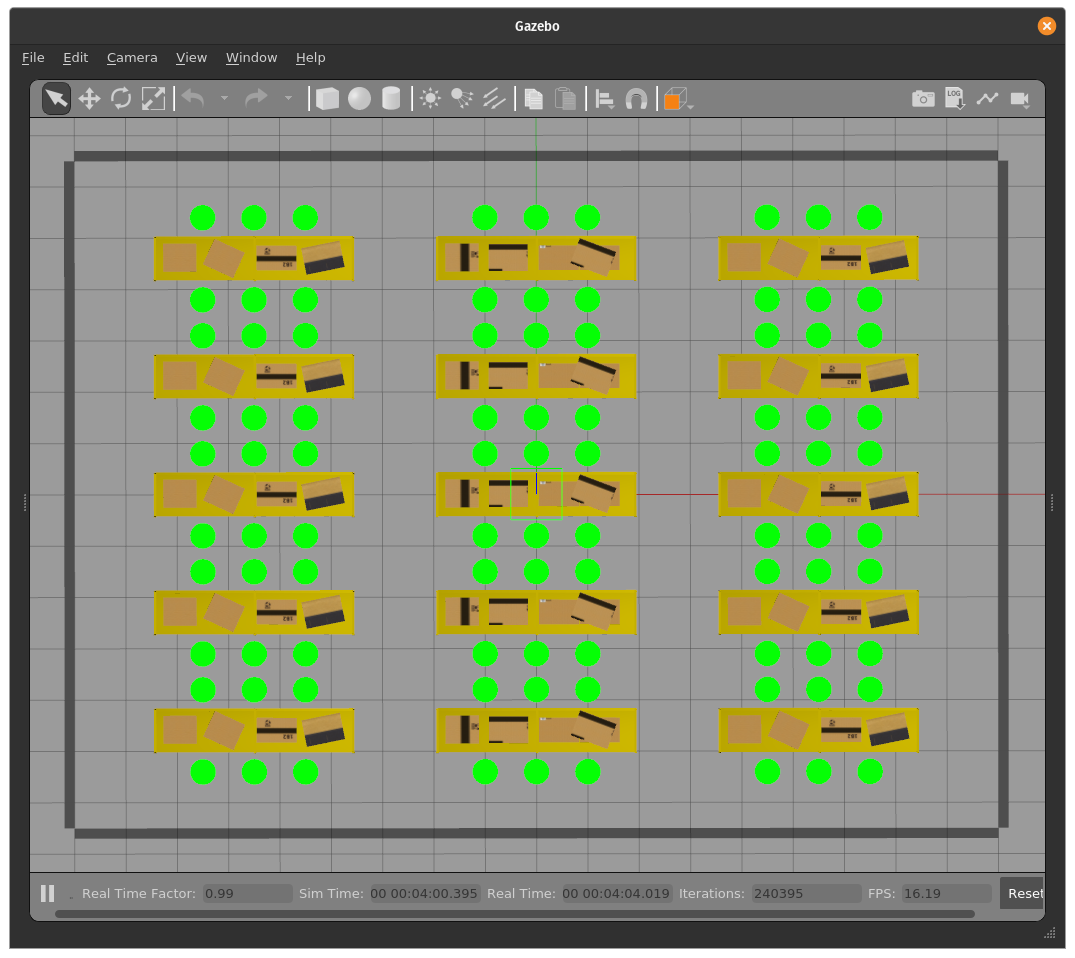
src/multirobot_control/params.scenario_randomis where several robots are spawned in random locations with random goals. To choose how many robots to spawn, you can edit this file. Remember to follow the structure of naming robots in order with name as"robotN"with N being an increasing integer. Maximum number of robots supported is 16.- Robots and goals will be in these locations



By default the scenario will not auto-start. To start it automatically, run ros2 launch multirobot_control spawn_bots.launch.py goal_creation:=true to launch the goal assignment node alongside the rest of the simulation.
To visualize the simulation in the Gazebo GUI, add in headless:=false to the list of arguments.
The list of arguments is as follows:
params_file: The path to the parameters file that sets the settings used by the DWA and RRT planners. Defaults to$WORKSPACE/src/multirobot_control/params/planner_params.yaml.headless:trueto run without the Gazebo GUI, otherwisefalse. Defaults totrue.log_level: Choose betweendebug,info,warn,error, based on the desired verbosity. Defaults toinfo.rviz:trueto run with the RViz demonstration,falseotherwise. Defaults totrue.goal_creation: Whether or not to auto-start thegoal_creationso the test scenario automatically starts. Defaults tofalse.
To change the parameters of the simulation, go into $WORKSPACE/src/multirobot_control/params/planner_params.yaml.
There is also a realtime_factor parameter in each of the scenario files that is currently set to 1.0. If you wish to speed up the simulation, you can increase it. However, do edit gazebo_params.yaml as well. The publish_rate parameter should not be less than 50*realtime_factor.
To test the robots, go into $WORKSPACE/evaluation. There are a few files to be configured:
-
config.pysets the search space based on the parameters. The default is to change the planner type with respect to the number of robots in the simulation. Other scenarios can be tested as well. -
create_test_scenarios.pycreates test scenarios based on the settings inconfig.py.- The settings are set in
scenario_settingsandparam_settingsinside the file. scenario_settingssets up the test scenario within the test world.- If desired to run random goals, leave
scenario_settings['goal_array']to be an empty list"[]". Else populate it with elements equal to exactly the number of robots in the simulation. An example is given in the comments, but another can be found in$WORKSPACE/src/multirobot_control/params/scenario_swap.yaml. - If desired to run random goals, specify the total number of goals and the watchdog timeout as well.
- Provide a set of starting x, y, and theta values for each robot if desired to start them in defined positions. An example is in the comments.
- If desired to run random goals, leave
param_settingssets up the default configuration of the robot.- This is similar to what is in
$WORKSPACE/src/multirobot_control/params/planner_params.yaml.
- This is similar to what is in
- The settings are set in
-
visualise_results.pyruns through the results of the tests. However, you will need to modify it to display the relevant metrics you wish. It collates:- Average number of goals completed per robot per run
- Total number of goals completed per run
- Average distance travelled per robot per run
- Average time spent planning per robot per run
- Average time spent moving per robot per run
-
evaluate_planners.bashcreates test scenarios by invokingcreate_test_scenarios.pyand runs all of them. -
To automatically run tests, run
bash evaluate_planners.bash. Depending on the test, this may take quite a while.
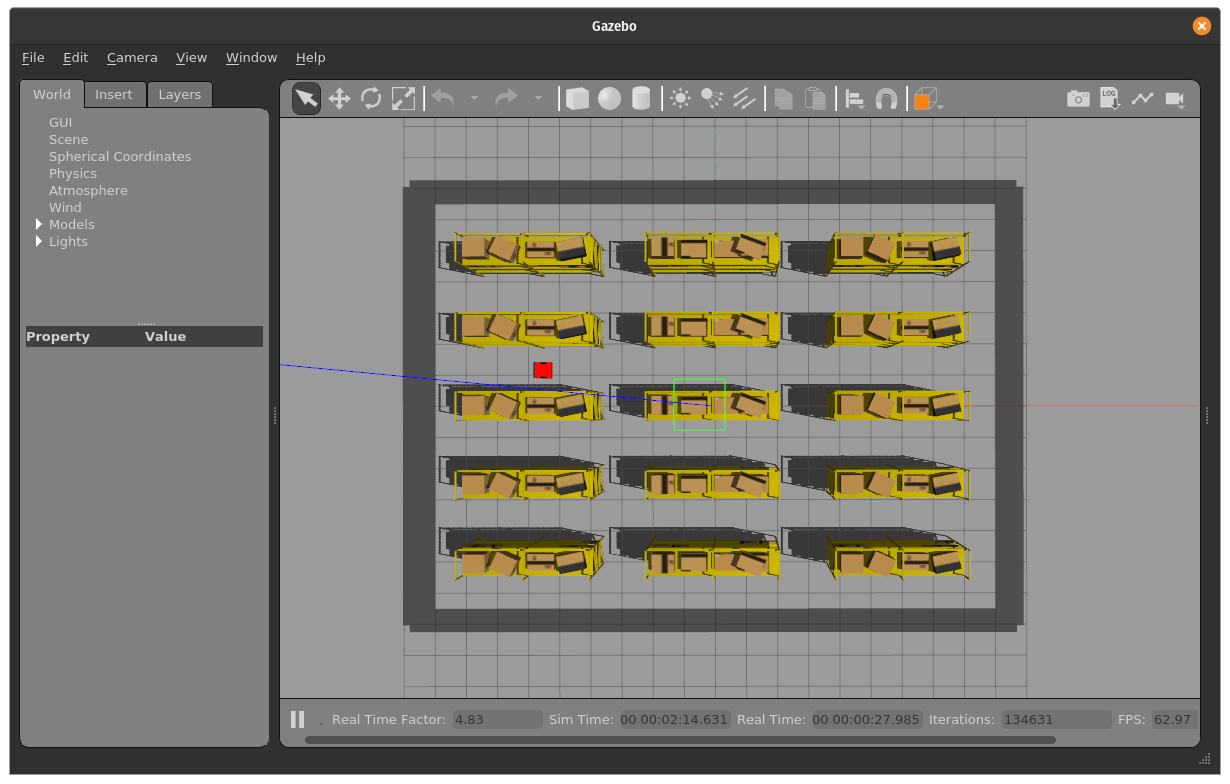
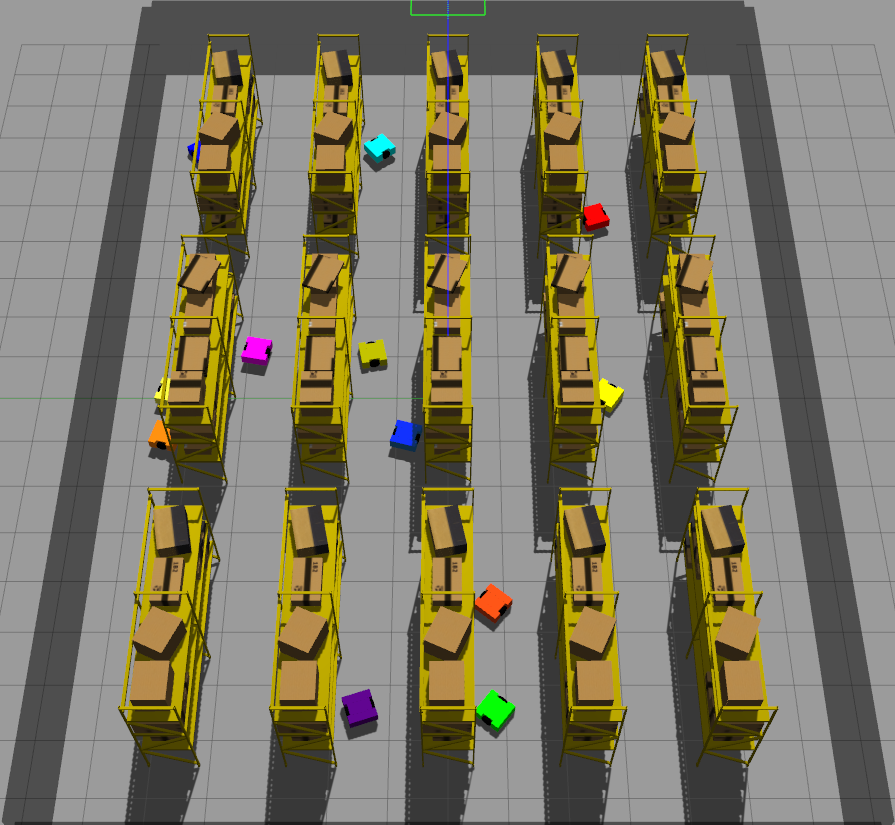
- Sim Environment:
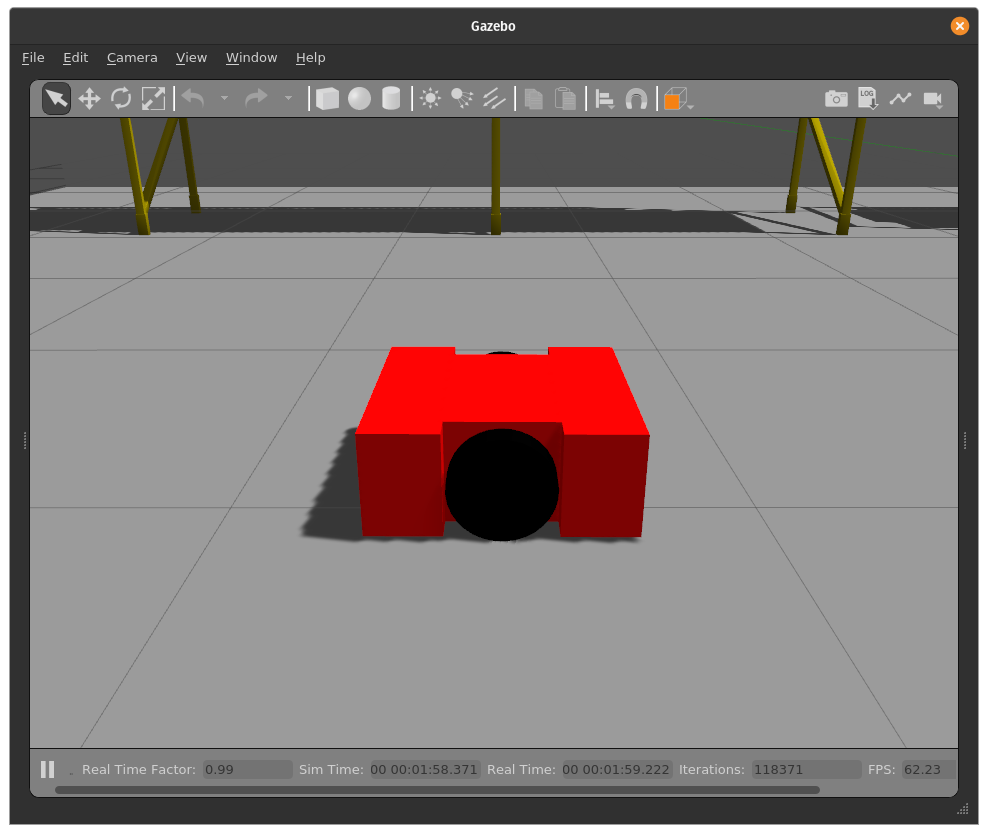
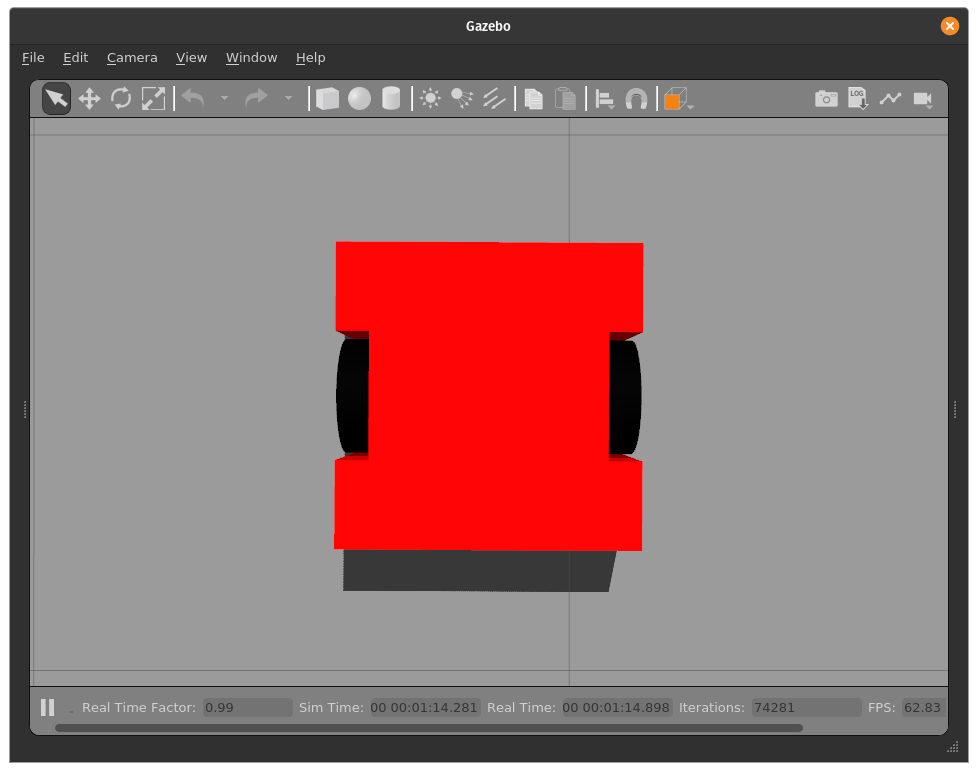
- Robot Photos
- Many robots in a simulation




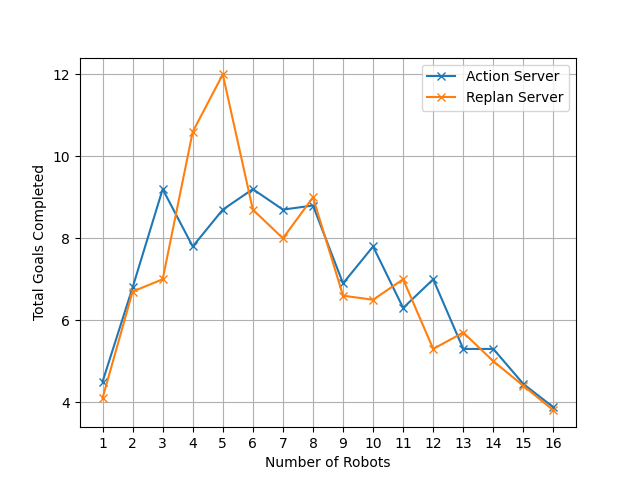
- Total goals per run with increasing robots
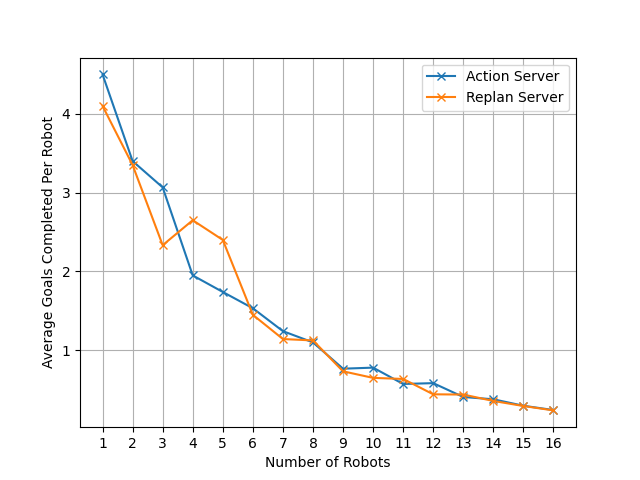
- Average goals per robot per run with increasing robots
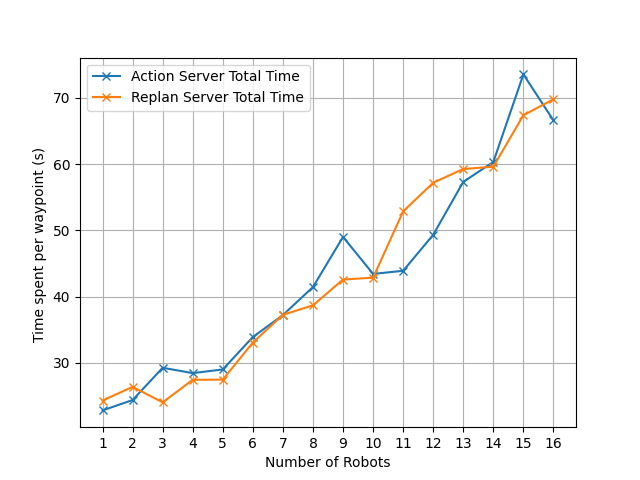
- Average time taken per waypoint per robot per run with increasing robots



| Parameter Name | Default Value | Description |
|---|---|---|
| robot_radius | 0.35 | The value of |
| safety_thresh | 0.3 | Safety distance |
| simulate_duration | 0.4 | Seconds to forward simulate a set of control inputs |
| action_duration | 0.03 | Seconds to carry out a set of control inputs |
| linear_speed_limit | 0.6 | Max value of |
| angular_speed_limit | 1.5 | Max value of |
| linear_step | 0.1 | Step size for |
| angular_step | 0.2 | Step size for |
| dist_thresh_hi | 0.3 | Distance threshold from robot to goal to consider to have reached a waypoint |
| dist_thresh_lo | 0.05 | Distance threshold from robot to goal to consider to have reached a goal |
| dist_method | "L2" | Method of calculating the distance to any point. Currently the only implemented method is the Manhattan distance, or L2 norm. |
| inter_robot_dist | 3.0 | Multiples of robot_radius for robots to keep away from other robots. |
| orientation_ub_deg | 180.0 | Max orientation difference to be considered in scoring function for heading |
| orientation_ub_deg | 20.0 | Min orientation difference to be considered in scoring function for heading |
| angular_K | 1.0 | Max proportion of s goal that would be deducted from the DWA score based on the orientation of the robot |
| goal_K | 10.0 | Score for distance to goal |
| obstacle_K | 1.0 | Cost for distance to obstacles |
| stall_det_period | 1.0 | Time window to check for stall |
| stall_dist_thresh | 0.1 | Lower distance (m) bound for stall detection |
| replan_duration | 5.0 | How long to wait (s) to replan when repeated replan requests are made |
| move_towards_goal_hint | True | Whether or not to use the stall detection method to give the robot inital values for command input |
| Parameter Name | Default Value | Description |
|---|---|---|
| rrt_path_bias | 0.1 | Bias rate for RRT planner to extend directly towards goal |
| rrt_it_lim | 500 | Maximum number of RRT iterations |
| rrt_it_min | 50 | Minimum number of RRT* iterations |
| rrt_max_extend_length | 1.5 | Distance (m) to extend a new point away from the original point towards a new one |
| rrt_connect_circle_dist | 1.5 | Distance (m) to find near nodes in the RRT* algorithm |
| rrt_debug_plot | False | Whether or not to plot the pathfinding process to matplotlib |
| waypoint_skip | True | Whether or not to skip redundant waypoints |
| waypoint_replan | False | Whether or not to replan if waypoints are too far away |
| local_planner | "dwa_replan_server" | Choice between DWA-R (default) and base DWA ("dwa_action_server") implementations |