This repository contains the code for the paper:
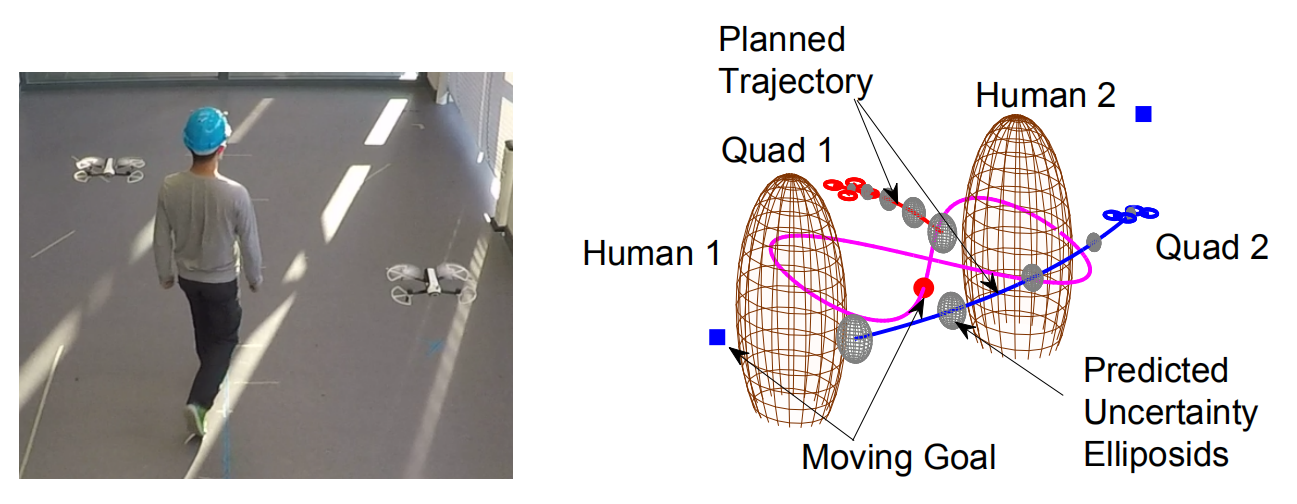
Chance-Constrained Collision Avoidance for MAVs in Dynamic Environments
Hai Zhu, and
Javier Alonso-Mora
Published in [RA-L + ICRA 2019]. You can find the full-text paper here.
Please click in the image to see our video:
If you find this code useful in your research then please cite:
@article{Zhu2019RAL,
title = {{Chance-Constrained Collision Avoidance for MAVs in Dynamic Environments}},
author = {Zhu, Hai and Alonso-Mora, Javier},
journal = {IEEE Robotics and Automation Letters},
number = {2},
volume = {4},
pages = {776--783},
publisher = {IEEE},
year = {2019}
}
The authors would like to thank Embotech for providing a license of the FORCES PRO software.
- ROS installation
- Ubuntu 16.04 (or 18.04)
- MATLAB R2017b (or R2019b) with the Robotics System Toolbox
- FORCES PRO software
This set of instructions have been tested for Ubuntu 16.04 with ROS-Kinetic and MATLAB R2017b, and Ubuntu 18.04 with ROS-Melodic and MATLAB R2019b.
-
Problem Set Up
- Launch a MATLAB instance and open initialize.m
- Setup the number of drones and dynamic obstacles
- Set cfg.modeSim as 1
- Set getNewSolver as 1 if a new mpc solver is required to be generated
-
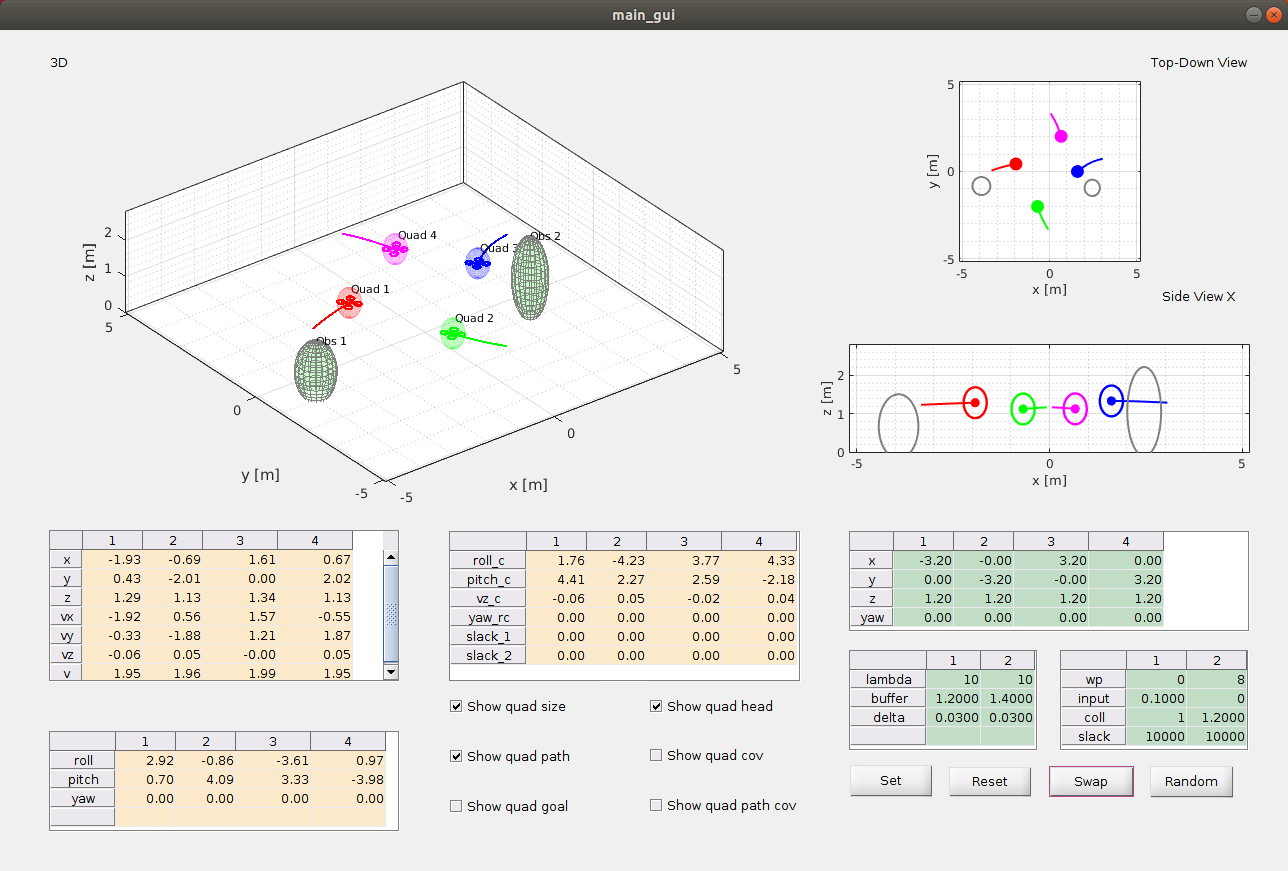
Open Visualization
- Start a MATLAB instance
- Run the script run_visual.m
-
Open the Controller
- Start another MATLAB instance
- Run the script run_main_basic.m
The code supports running experiments using the Parrot Bebop 2 quadrotors. Real-time state estimation of the quadrotors and moving obstacles are required. The following packages will be useful if you want to set up real-world experiments:
- bebop2_toolbox: https://github.com/hai-zhu/bebop2_toolbox.git
- obstacle_estimator: https://github.com/hai-zhu/obstacle_estimator.git
- bebop_autonomy: https://github.com/AutonomyLab/bebop_autonomy.git