This repository holds tools for rendering event_camera_msgs. It builds under both ROS1 and ROS2.

Currently tested on Ubuntu 20.04 (ROS Noetic and ROS2 Galactic) and Ubuntu 22.04 (ROS2 Humble).
Set the following shell variables:
repo=event_camera_renderer
url=https://github.com/ros-event-camera/${repo}.gitand follow the instructions here
Examine the launch file and adjust the topic remapping, frequency
etc, then start as follows (assuming the camera driver is running
under node name event_camera):
ROS1:
# create rendered ROS image stream from events
roslaunch event_camera_renderer renderer.launch camera:=event_camera
rqt_image_view
ROS2:
# create rendered ROS image stream from events
ros2 launch event_camera_renderer renderer.launch.py camera:=event_camera
ros2 run rqt_image_view rqt_image_view
Parameters:
fpsFrequency (in hz) at which images are emitted. Default: 25.display_typeSupported types aretime_slice(all events between frames are aggregated) orsharp(number of events is auto-controlled to produce sharp features). Default istime_slice. This image shows the difference (left is sharp, right is time_slice):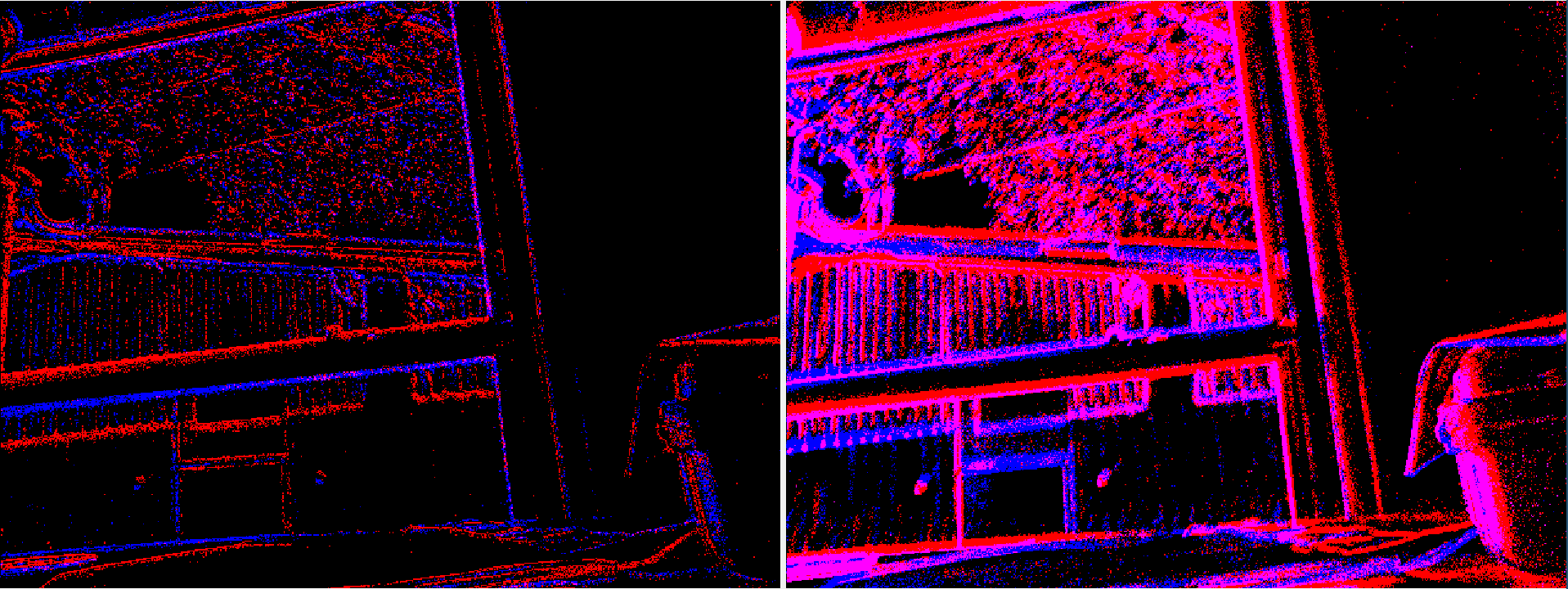

This software is issued under the Apache License Version 2.0.