YOLOv4 weight link put files in folder workspace/src/affordance_ros/part_detection/weights/20210806/
DeepLab V3+ weight link put files in folder workspace/src/affordance_ros/part_sematic_seg/weights/
#YOLOv4
chomod +x demo_d435i.py
. devel/setup.bash
roslaunch part_detection part_detection.launch
#DeepLab V3+
chomod +x juice_seg.py
chomod +x popcorn_seg.py
chomod +x show_seg_all.py
. devel/setup.bash
rosrun part_sematic_seg juice_seg.py
rosrun part_sematic_seg popcorn_seg.py
rosrun part_sematic_seg show_seg_all.py
- Install realsense-ros
- Install cv_bridge for Python3
- Ubuntu 18.04
- ROS Melodic
- Python 3.6.9
- opencv 4.5.1 cv2 (?)
- cv_bridge (python3 待測試) (?)
- Install pcl (?)
- Install cv_bridge(?)
-
(1)
part_detection: YOLOv4, YOLOv4-tiny- popcorn_f, popcorn_b, juice
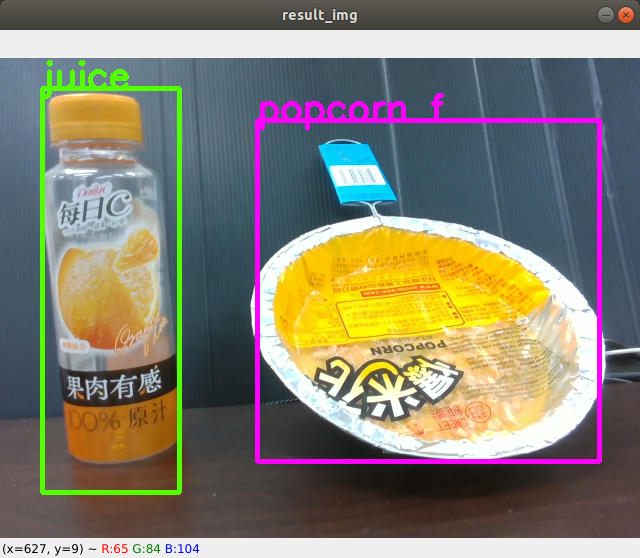
part_detection_result -
(2)
part_sematic_seg: DeepLab V3+- plant, handle, cap, body
.png)
.png)
part_sematic_seg(juice), part_sematic_seg(popcorn).png)

.png)
.png)
.png)
part_sematic_seg(juice,popcorn)