ROS package for the BeagleBone that publishes the altimeter MPL3115A2 values into a topic.
The python script checks if Linux i2c-tools have been installed and in that case it runs a loop that gathers and publishes altitute samples. The sensor can also get samples of pressure and/or temperature. Take a look at the datasheet for more details.
There's also more information about the sensor at the Data Manipulation and Basic Settings of the MPL3115A2 Command Line Interface Driver Code and Sensor I2C Setup and FAQ. The equations used for the altimeter are further explained at Pressure Altimetry using the MPL3115A2.
This ROS package makes use of the Linux i2c-tools so you should install them before running the package
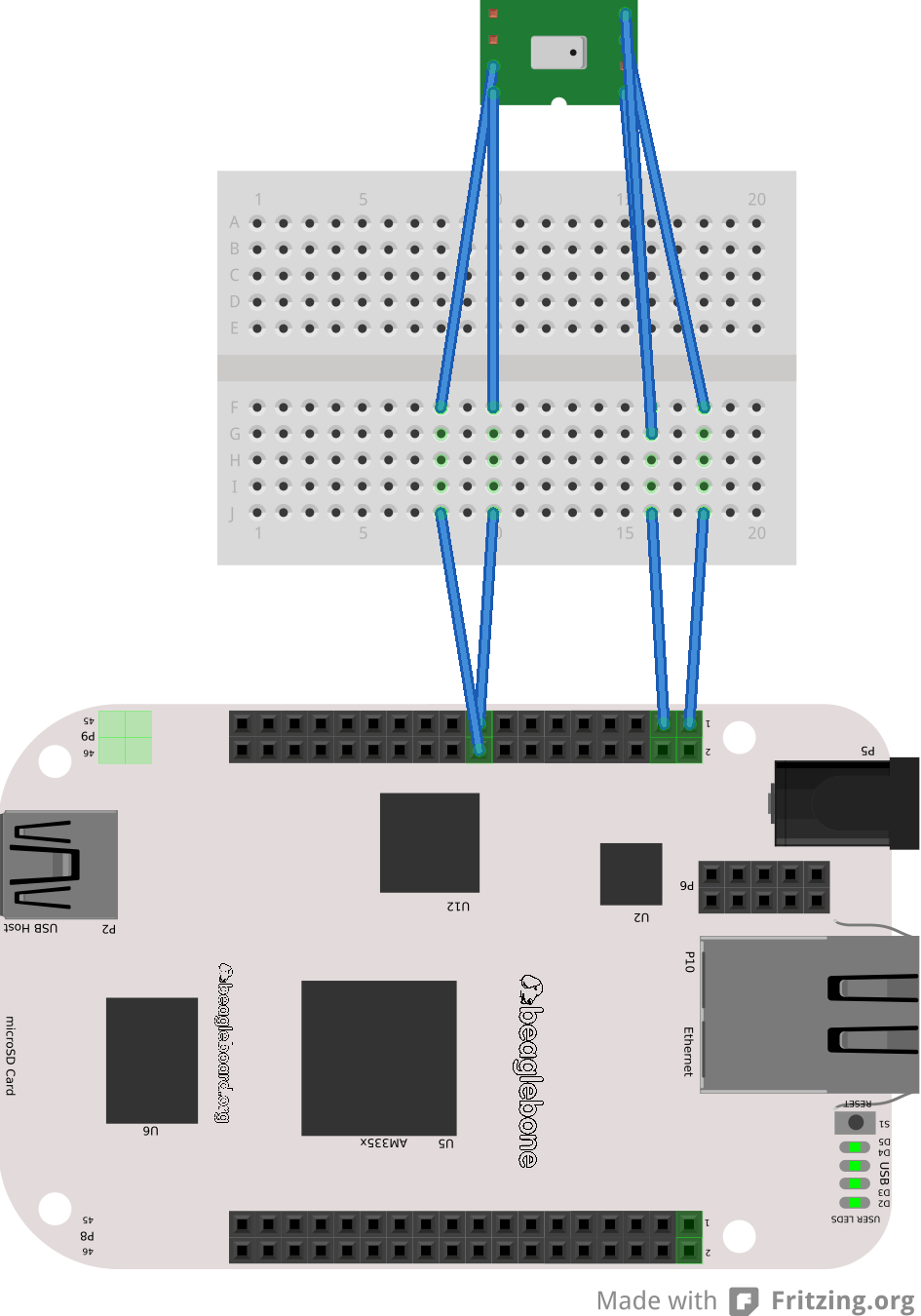
####mpl2115a2 ROS node that fetches altimeter data from the MPL3115A2 and publishes it to a topic through the i2c-dev interface. By default the sensor is assumed to be connected to the I2C Bus 1 (i2c-2 in the Beaglebone) at the address 0x60.
#####Published topics altimeter (std_msgs.msg String)