DSEC
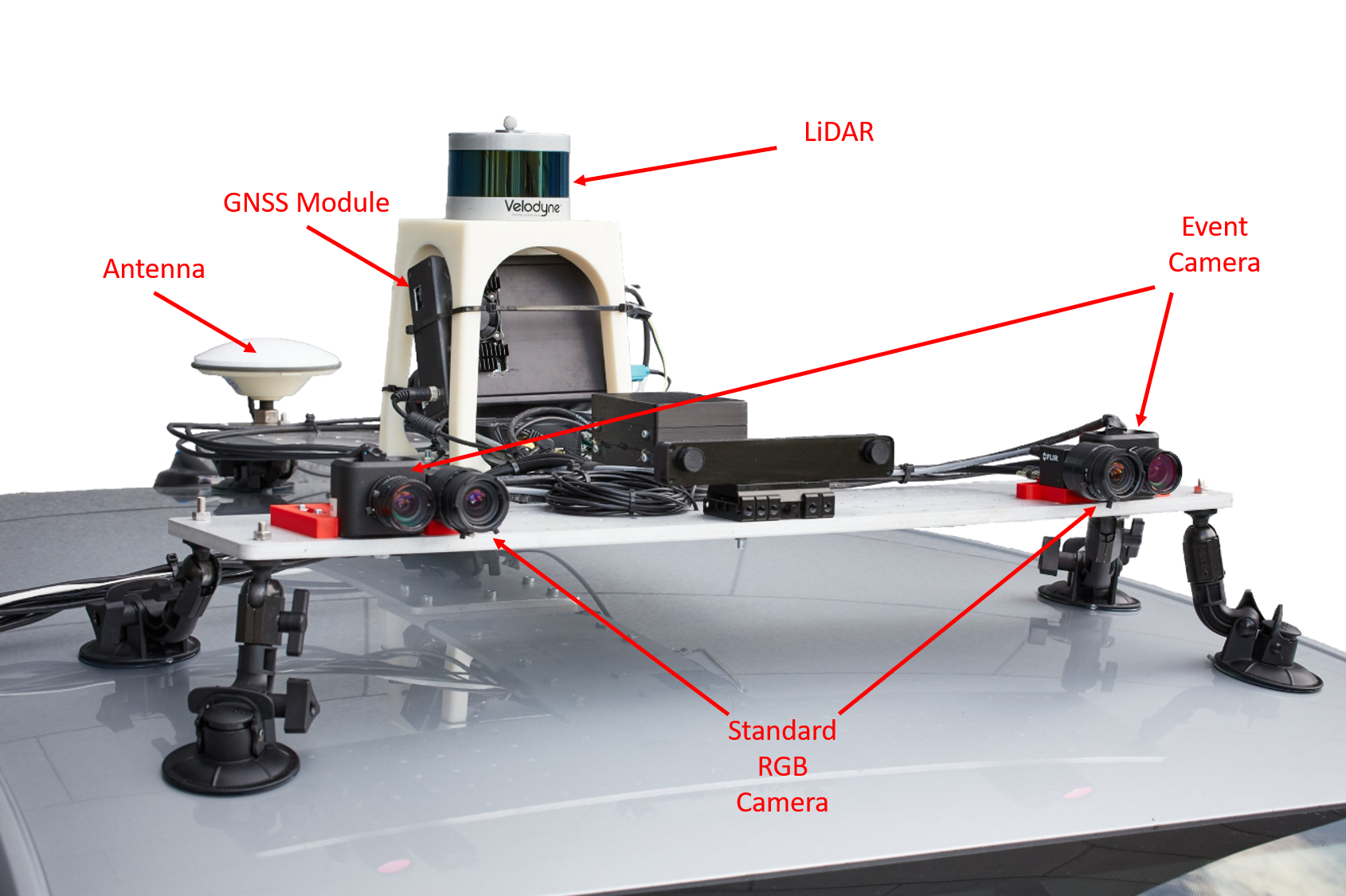
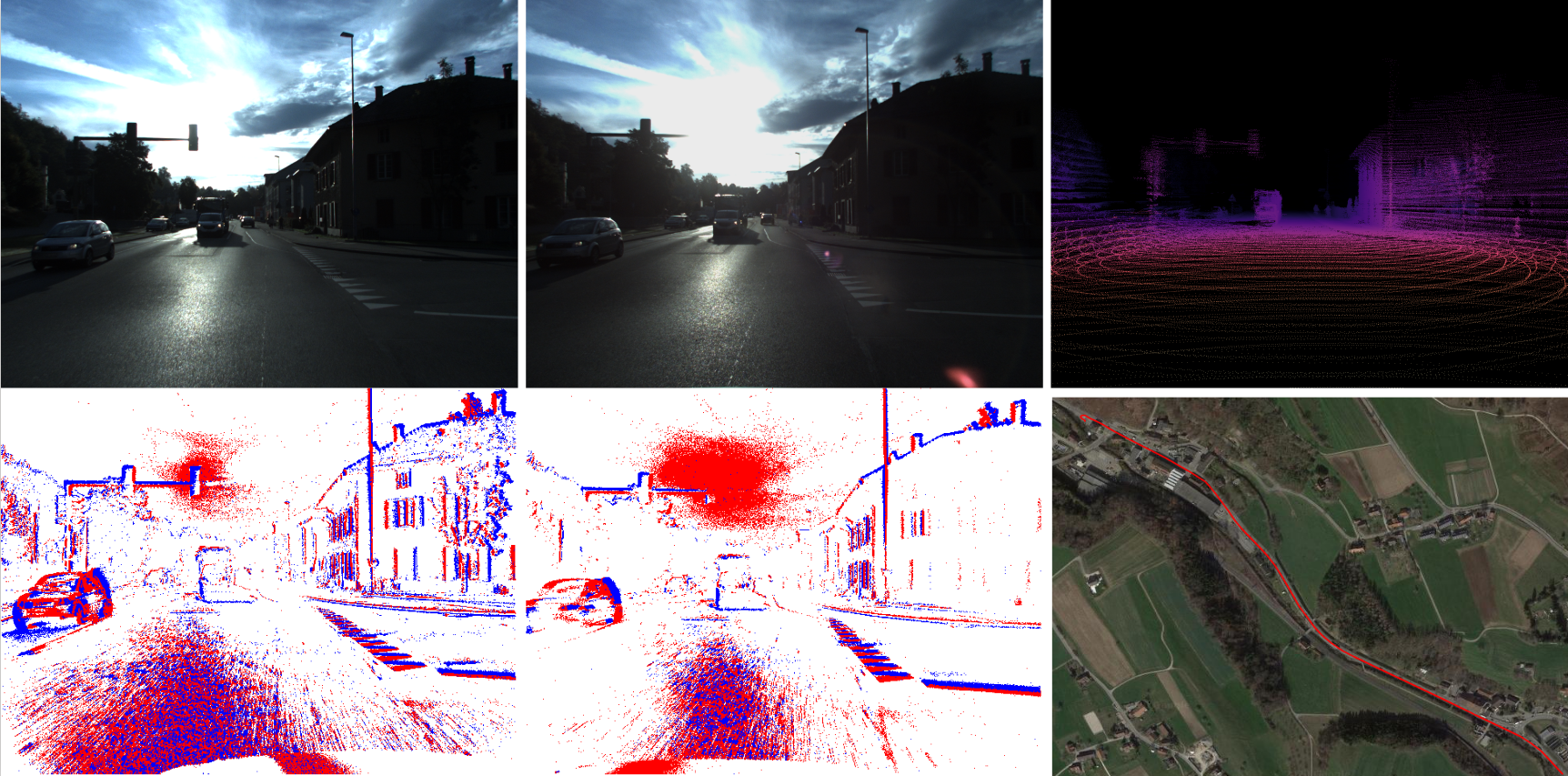
DSEC is a hybrid stereo event camera and video camera dataset in driving scenarios.
Visit the project webpage to download the dataset.
Install
- Clone
git clone git@github.com:uzh-rpg/DSEC.git- Install conda environment to run example code
conda create -n dsec python=3.8
conda activate dsec
conda install -y -c anaconda numpy
conda install -y -c numba numba
conda install -y -c conda-forge h5py blosc-hdf5-plugin opencv scikit-video tqdm prettytable
# only for dataset loading:
conda install -y -c pytorch pytorch torchvision cudatoolkit=10.2
# only for visualilzation in the dataset loading:
conda install -y -c conda-forge matplotlibData Format
The disparity groundtruth is provided in the rectified coordinate frames of the left cameras.
Disparity
Disparity maps are saved as uint16 PNG files. We provide example python code in the dataset directory for convenience.
A value of 0 indicates an invalid pixel where no groundtruth exists. Otherwise, disparity of valid pixels can be computed by converting the uint16 value to float and dividing it by 256:
disp[y,x] = ((float)I[y,x])/256.0;
valid[y,x] = I[y,x]>0;
The reference view is the left event or rgb global shutter camera respectively. This is the same convention as the KITTI stereo benchmark.
Image
Image data is available in 8-bit PNG files and is already rectified.
Events
Event data is stored in compressed h5 files. The structure of the h5 file is the following:
/events/p
/events/t
/events/x
/events/y
/ms_to_idx
/t_offset
-
/events/{p, t, x, y}contains the polarity, time, x (column idx), and y (row idx) coordinates. The time is in microseconds. -
/t_offsetis the time offset in microseconds that must be added toevents/tto retrieve the time in synchronization with image data, disparity data, and events from the other camera. This offset enables the storage of timestamp data with fewer bits. -
/ms_to_idxis the mapping from milliseconds to event indices. It is used to efficiently retrieve event data within a time duration. It is defined such thatt[ms_to_idx[ms]] >= ms*1000t[ms_to_idx[ms] - 1] < ms*1000,
where
msis the time in milliseconds andtthe event timestamps in microseconds. We provide python code that can be used to retrieve event data.
Rectification
Unlike image data, event data is not rectified or undistorted to simplify data storage.
Rectified and undistorted event data can be computed using the rectify_maps.h5 file that is associated with each event h5 file.
We provide example python code in the dataset directory for convenience.
The event data stored in the events.h5 file contains pixel coordinates as recorded by the sensor.
Hence, this data is subject to lens distortion and not yet rectified.
rectify_map contains the rectified pixel coordinates:
rectified_coordinates = rectify_map[y, x]
x_rectified = rectified_coordinates[..., 0]
y_rectified = rectified_coordinates[..., 1]
Camera Calibration File
Camera calibration data is summarized in the cam_to_cam.yaml. The naming convention is as follows:
Intrinsics
cam0: Event camera leftcam1: Frame camera leftcam2: Frame camera rightcam3: Event camera rightcamRectXRectified version of camX. E.g. camRect0 is the rectified version of cam0.
Extrinsics
T_XY: Rigid transformation that transforms a point in the camY coordinate frame into the camX coordinate frame.R_rectX: Rotation that transforms a point in the camX coordinate frame into the camRectX coordinate frame.
Disparity to Depth
The following two quantities are perspective transformation matrices for reprojecting a disparity image to 3D space.
cams_03: Event camerascams_12: Frame cameras
FAQ
Why is the groundtruth for the test set not available?
We are working on creating a public benchmark for you to submit the results.