
NOTE: This project has come to an end! Currently efforts are in place to translate some of these nodes or the principle of them to the crazyswarm2 project, which will be eventually be published to be the official Crazyflie2 ROS package.
This is my Bitcraze Summer project of 2022! Purpose: To use ROS2 to implement SLAM and navigation with the Crazyflie, Flow deck and Multiranger, on both the real drone and simulation.
This is very much in progress but I'm excited to work on this and very confident that this will work at the end. Also this is a good opertunity for me to show an ROS2 implementation of a new platform from scratch, so why not start with the Crazyflie :)
See this Blogpost explaining the bulk of the current process.
Pretty much this:

... but with a map generated while doing it, and using navigate with it. And... being able to do this on a real Crazyflie too! How hard can it be? :D
But no seriously, I hope to at least get the SLAM mapping toolbox to work by the end of the summer 2022, and from there it is an ongoing project that can pretty much go on. If we got something working and stable, it could be part of an official Crazyflie_ROS2 package that we release in the future. Also it would be great to show these with existing packages like SLAM_toolbox or NAV2.
For now this project is on my personal github repo for now and once there is something solid working it will be probably transfered to the Bitcraze Github organization.
Currently the simple_mapper node works on a real crazyflie what is controllable through twist messages.
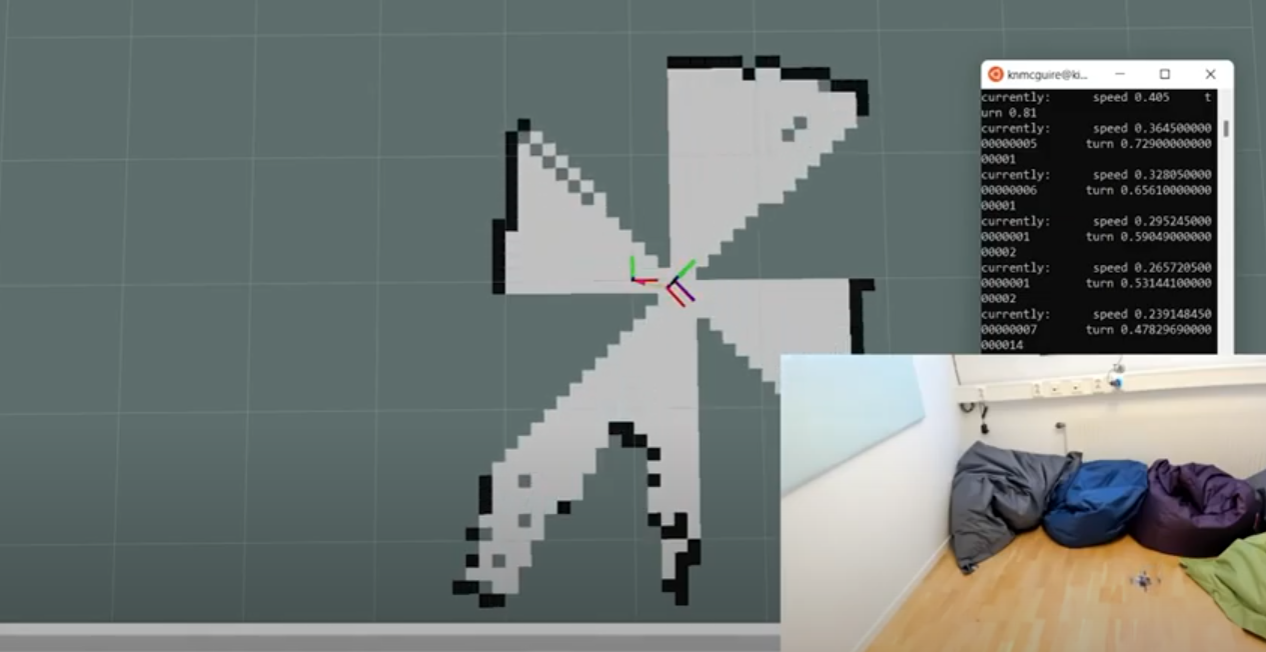
As you can see this is quite difficult to achieve! That is why we need to get the slamtoolbox tuned and ready.
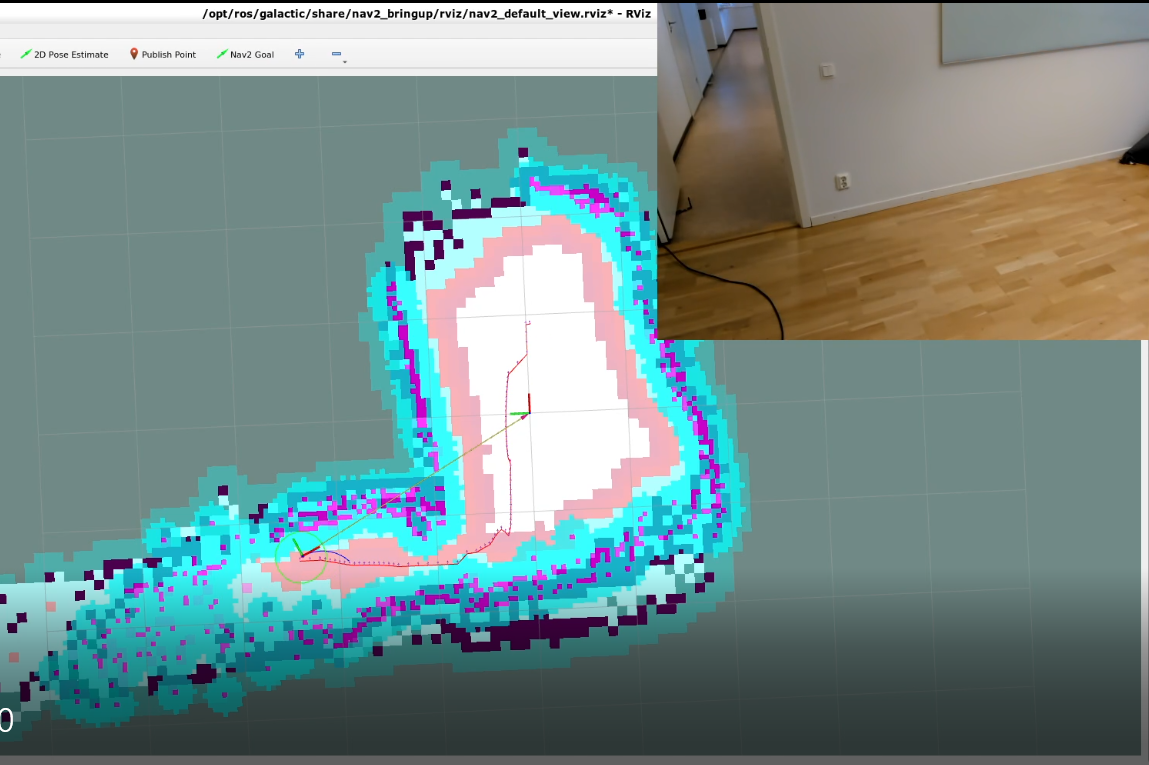
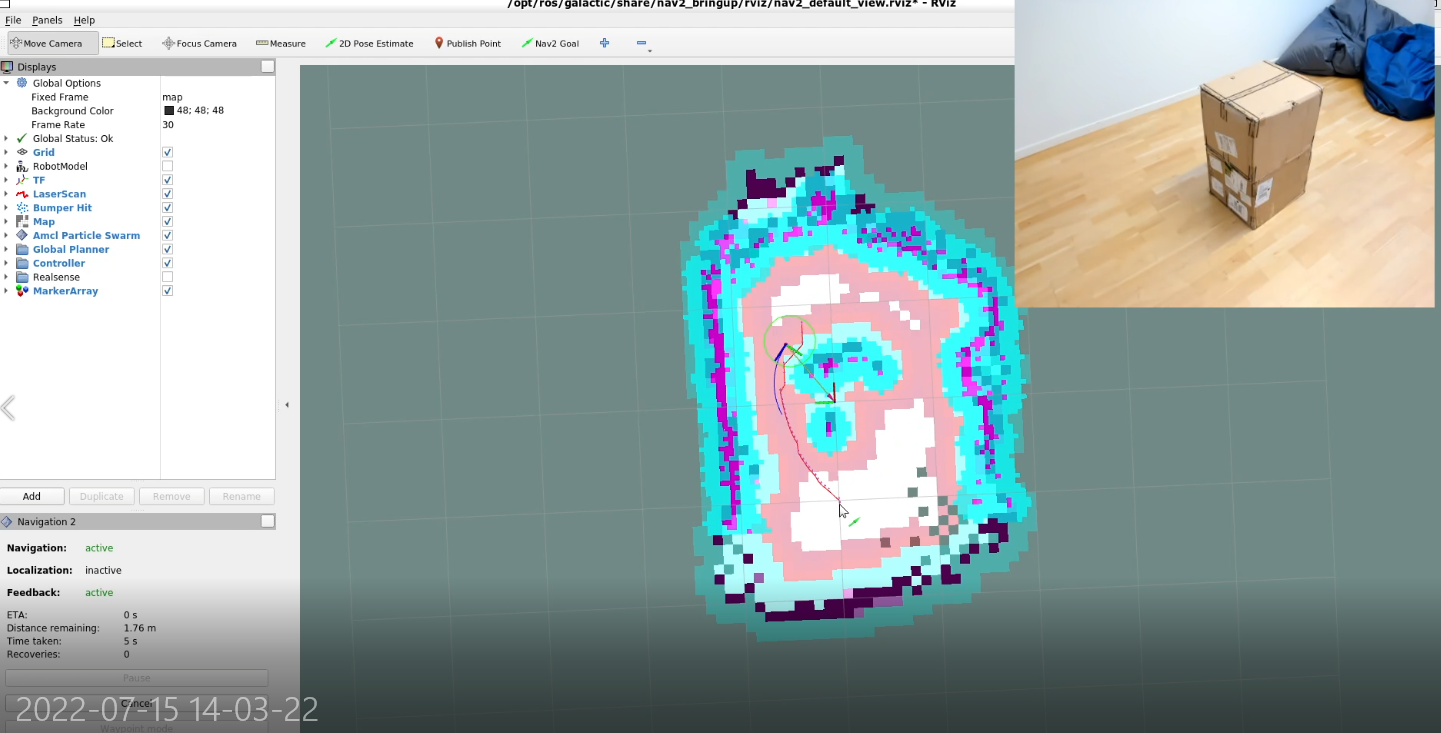
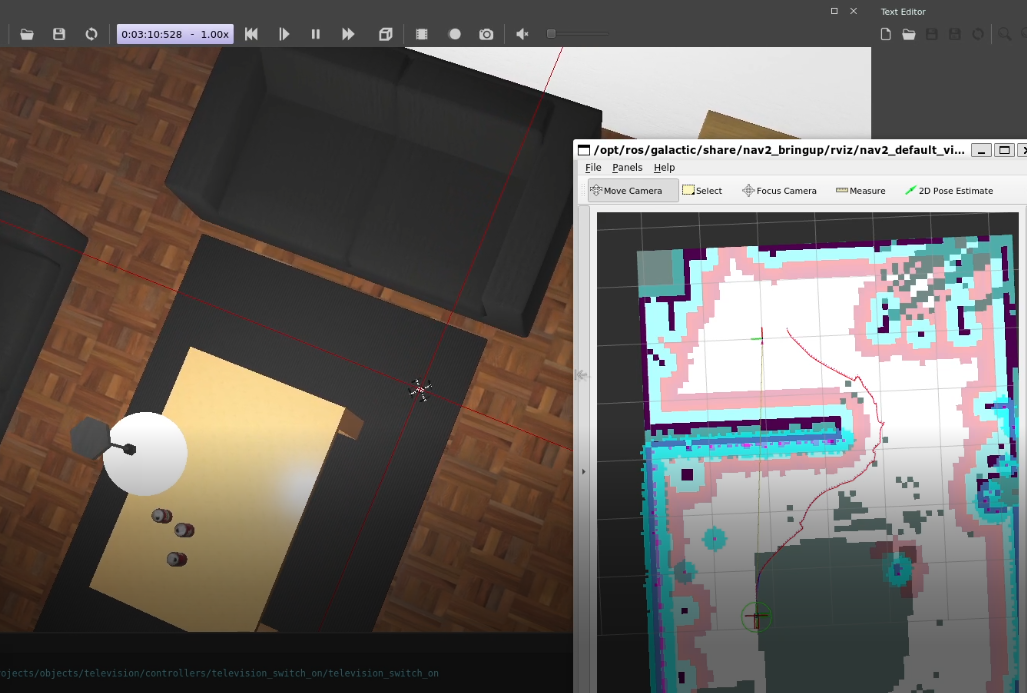
This a video of the slamtoolbox in simulation without ray fitting on, together with the nav toolbox. In order to get rayscanning to work we need more tuning.
-
crazyflie_ros2: The Crazyflie package that has contact with the Crazyflie directly and publishes the transforms
-
crazyflie_ros2_description: The package that handles the RVIZ screen and also includes meshes if necessary
-
crazyflie_ros2_simulation: A webots simulator world and ROS node controller (based on the experimental bitcraze simulation repo)
-
crazyflie_ros2_slam: Using an existing SLAM toolbox to create a map
-
crazyflie_ros2_simple_mapper: An own made simple mapper functionality for multirangers and flowdeckbased odometry
-
crazyflie_ros2_navigation: Using the NAV2 bringup package with changed parameters
-
crazyflie_ros2_scan: Node that turns multiranger into 360 scan (not finished, check issues)
-
crazyflie_ros2_interfaces: Containing actions or messages specific to crazyflie ros2
-
... more to come (check planning)
ROS2 version: Humble Webots version: 2023a
First go to your development workspace and run:
source /opt/ros/galactic/local_setup.bash
colcon build
source install/setup.bash
Start RVIZ2 by typing
rviz2
and select the map visualization
You can control both the simulated and real crazyflie with twist messages:
ros2 run teleop_twist_keyboard teleop_twist_keyboard
You will need an STEM ranging bundle for this.
All these nodes will make the Crazyflie take off right away to height of 0.5 meters
ros2 launch crazyflie_ros2_simple_mapper simple_mapper_real_launch.py
Not working ideally yet!
ros2 launch crazyflie_ros2_slam slam_toolbox_real_launch.py
For now only with simple mapper
ros2 launch crazyflie_ros2_navigation navigation_real_launch.py
First install webots 2022a
This crazyflie webots controller uses the python bindings of the crazyflie firmware. Replace this line in crazyflie_ros2_simulation/crazyflie_ros2_simulation/crazyflie_webots_driver.py with the location of your crazyflie-firmware repo and do make binding_pythons:
sys.path.append('/home/knmcguire/Development/bitcraze/c/crazyflie-firmware')
import cffirmware
ros2 launch crazyflie_ros2_simple_mapper simple_mapper_simulation_launch.py
Not working ideally yet!
ros2 launch crazyflie_ros2_slam slam_toolbox_simulation_launch.py
With the slamtoolbox with use_scan_matching on False
ros2 launch crazyflie_ros2_navigation navigation_simulation_launch.py
Make a publish ROS2 node for crazyflie (with cflib) to publish pose and transformMake crazyflie description package with RVIZ visualization file and crazyfie robot meshMake crazyflie_ros2_slam node starting with the slam_toolbox's parametersConnect crazyflie_ros node to the crazyflie_ros2_node and generate an map with Rviz (needs tuning in simulation firstMake crazyflie_ros2_simulation package with WebotsTurn the multiranger pointcloud example into a rosnode equivalent (crazyflie_ros2_simple_map)Have simulator run in simple mappingnodeHave real crazyflie fly in simple mapper nodeConnect webots simulation to the SLAM toolboxIn Simulation tune the SLAM toolbox to work for 4 laser rangers (if possible)If tunable, try out on real crazyflie + multiranger-> doesn't work as I hoped.- Make node that makes a 360 scan message of a rotating crazyflie
- Connect 360 scan with slamtoolbox and see if it improves things
Try NAV2 on simple mapper node- Make 3d mapping vizualization
- Implement wall following?
- If available, use python bindings of the Crazyflie's onboard EKF
- Try out new multi-zone multiranger deck
crazyflie_ros needs to publish odometry messages properly- replace manual crazyflie robot after webot's release to 2022b
- Action can not handle multiple threads so topic handling is not great. Should fix with this: https://answers.ros.org/question/356434/ros-2-actionserver-callback-causes-subscriber-to-stop-receiving/
- Simulation underestimates position crazyflie which results in a weird map building in simple mapper (didn't had this 2 weeks ago??)
- THe yaw control on the webots driver is much slower than with the crazyflie driver.. eventhough it is the same code.
For installing cflib as an external dependency
sudo mkdir -p /usr/local/share/ros && sudo cp cflib-python.yaml /usr/local/share/ros
echo "yaml file:///usr/local/share/ros/cflib-python.yaml" | sudo tee -a /etc/ros/rosdep/sources.list.d/20-default.list
rosdep update
rosdep install --from-paths src --ignore-src -r -y
WSL use https://github.com/dorssel/usbipd-win/wiki/WSL-support
Run TF tree viewer
ros2 run rqt_tf_tree rqt_tf_tree --force-discover
Problem gui wsl microsoft/wslg#554
LIBGL_ALWAYS_SOFTWARE=true
ros2 launch slam_toolbox online_async_launch.py