Demo video:
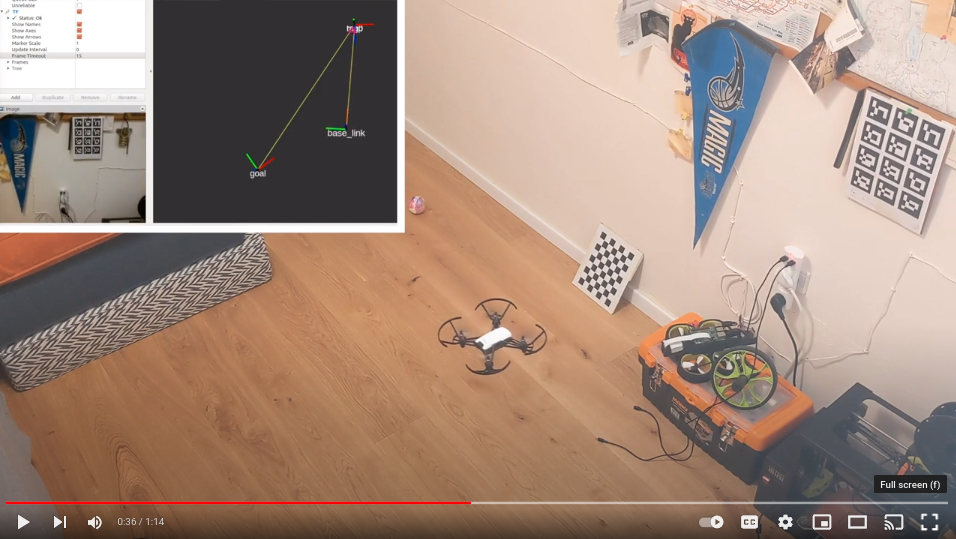
This is an ongoing project in pursuit of autonomizing a small Tello drone. To date, the robot can localize itself with respect to visual markers and follow waypoints. The goals of this project are:
- Localize in a known map via landmark observations (e.g., markers, visual features, etc.).
- Navigate to arbitrary points on the map. Start with straightshot navigation and improve it with proper path planning in an occupancy grid.
- Experiment with onboard computation (Raspberry Pi Zero 2W?) for visual feature extraction and localization.
Let's recap what we have so far. Also, before we begin, I would like to point out that this is not a thorough installation guide. If you'd like to build this code locally and use it (and you are having trouble doing so), then let me know and I'll expand on the installation/build process. I actually ended up writing quite a bit about the installation process -- still, let me know if you need more.
pass
My setup runs on Ubuntu 16.04 and ROS Kinetic. I installed PyAV with the following command: python -m pip install av==0.5.2 and my Python version is: 2.7.12. The backbone of our communication with the Tello is owed to the great work done on the package tello_driver, I cannot emphasize enough how great the work on this package is! It allows us to do so much with the Tello.
For the following commands, you'll need catkin tools.
# Clone/fork this repository into some location in your computer
git clone https://github.com/yoraish/botello.git
# Navigate to the workspace.
cd botello/botello_ws
# Start by building only tello driver
catkin build tello_driver
# Build all the packages.
catkin build
# Source your setup file.
source path/to/botello_ws/devel_setup.bash # Or .zsh if you use that.
# Launch all the nodes (after connecting to the Tello via WiFi).
roslaunch botello_driver tello_driver.launchIf this does not work for you, then you should install tello_driver independently, then clone this repository, and finally replace tello_driver (of this repository) with the copy that you have installed independently.
I think installing tello_driver independently should solve some issues like
from tellopy._internal import tello
ImportError: No module named _internalTo get it to work, I created a fresh workspace and installed tello_driver from source with the following:
# create some folder_ws/src,
$ cd /path/to/the/folder_ws
$ catkin init
$ cd src
$ git clone --recursive https://github.com/appie-17/tello_driver.git
$ cd ..
$ catkin build
$ source /path/to/the/folder_ws/devel/setup.bash # Or zsh if you use that like me.
$ roslaunch tello_driver tello_node.launch # To check if it works.To keep tello_driver in this repository without making it a submodule (this is not good practice, sorry!), I ended up removing its .git directory.
One option for localization landmarks is Aruco gridboards. Those are sets of Aruco markers organized in a grid layout. The benefit of gridboards over individual markers is the greater number of corners (corners = 4 * markers) used for computing the relative pose of the camera with respect to the board (PnP problem solution).
To create gridboards, you may make use of the script at /botello_ws/src/botello_aruco_gridboard/scripts/create_aruco_gridboard_images_and_yamls.py. This script creates images of gridboards and also corresponding YAML files specifying the layout of every board. Note that the ids present in each board are added to each image and may overlap with the markers (which is not good!), so move those if needed.
By default, the botello_aruco_gridboard and botello_localization nodes look for the frame board0 as the board that is placed in the origin of the map frame.
The steps for generating it, and other gridboards, are the following. There are two options for step 1. The rest of the steps are common.
- In the
configfolder, paste all of your gridboard layout YAML files. Make sure to name of them (the one to be at the origin, its bottom left corner)board0.yaml.
-
Populate the
configfolder with new gridboard YAML layouts withpython create_aruco_gridboard_images_and_yamls.py. Pay attention to the size of the markers and the margin between them and ensure that it matches your physical (printed?) marker grids. Also, rename one of the boards toboard0.yaml. The bottom left corner of this board would be at the origin of the map frame. -
Call
python3 combine_aruco_gridboard_yamls.pyto create a joint YAML file with all of your gridboards. The transformations betweenboard0and all other boards are specified in the script itself. This will create the filebotello_layout.yamlwhich would be used bybotello_localization, to perform, well, localization :).