VoxelMapPlus
Voxelmap++: Mergeable Voxel Mapping Method for Online LiDAR(-inertial) Odometry
Introduction
VoxelMapPlus is an expension with some new features about VoxelMap (https://github.com/hku-mars/VoxelMap)
- Incrementally 3DOF plane fitting and update method based on least squares estimation
- Plane merging method based on union-find which consider the coplanar relationship between voxel
- Computationally efficient, low memory usage
- Adapt different kinds of LiDARs (multi-spinning LiDARs and non-conventional solid-state LiDARs)
 The framework about VoxelMap++
The framework about VoxelMap++
 The Merged VoxelMap about Liren Building
The Merged VoxelMap about Liren Building
 The PointCloud Map about Liren Building
The PointCloud Map about Liren Building
Developers:
Yuan You 游远, Yifei Yuan 袁翼飞
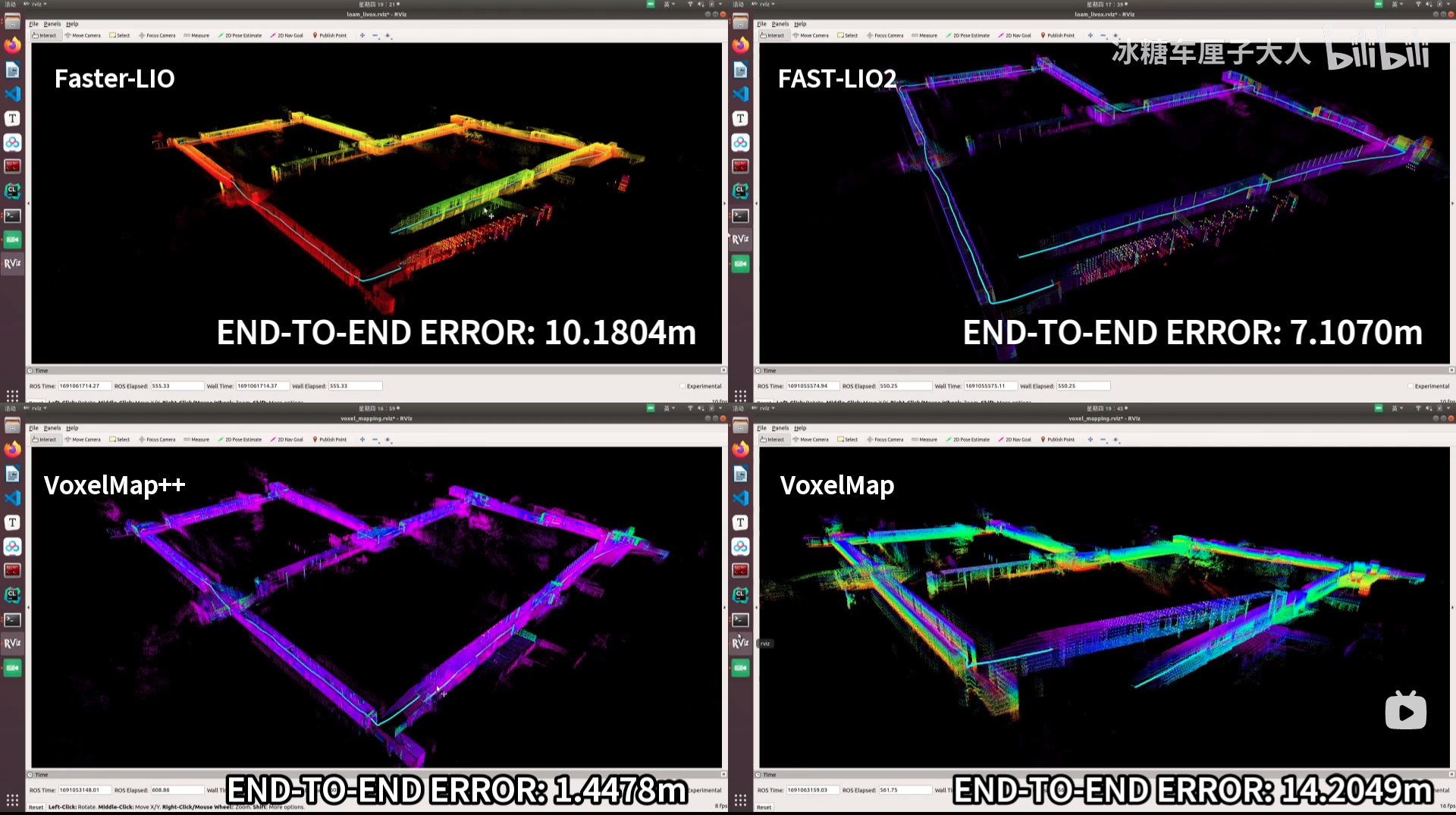
Related video
Our accompanying videos are now available on Bilibili.
Related paper
Related paper available on arxiv:
- Voxelmap++: Mergeable Voxel Mapping Method for Online LiDAR(-inertial) Odometry
- Efficient and Probabilistic Adaptive Voxel Mapping for Accurate Online LiDAR Odometry
- FAST-LIO2: Fast Direct LiDAR-inertial Odometry
1. Prerequisites
1.1. PCL && Eigen
PCL>= 1.8, Follow PCL Installation.
Eigen>= 3.3.4, Follow Eigen Installation.
1.2. livox_ros_driver
Follow livox_ros_driver Installation.
2. Build
Clone the repository and catkin_make:
cd ~/$A_ROS_DIR$/src
git clone https://github.com/uestc-icsp/VoxelMapPlus_Public.git
cd ..
catkin_make
source devel/setup.bash
- Remember to source the livox_ros_driver before build (follow 1.2 livox_ros_driver)
3. Run on Dataset
3.1 Run on Our LivoxHap Odometry dataset
Step A: Download Datasets 链接: https://pan.baidu.com/s/1-y3x7tbPbyr3LlFnH-FkWw?pwd=ICSP 提取码: ICSP
Step B: Setup before run
Edit config/velodyne.yaml to set the below parameters:
- LiDAR point cloud topic name:
lid_topic - IMU topic name:
imu_topic - If you want to show the voxel map, set
pub_voxel_maptotrue - If you want to show the accumulated point cloud map, set
pub_point_cloudtotrue
Step C: Run below
cd ~/$VOXEL_MAP_PLUS_ROS_DIR$
source devel/setup.bash
roslaunch voxel_map_plus mapping_velodyne.launch
Step D: Play rosbag.