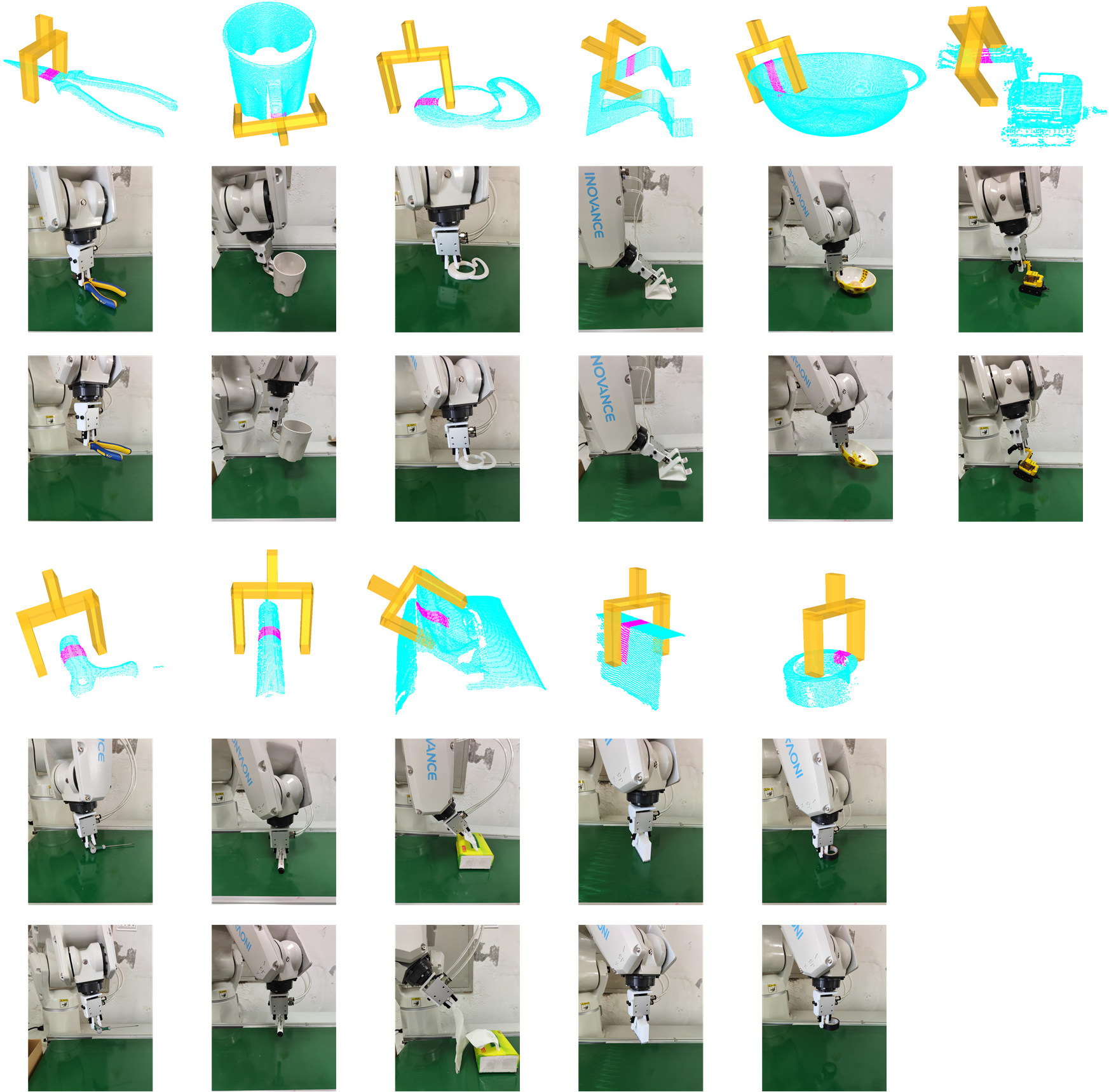
6-DOF-ConvGPD 基于未知物体三维点云特征的机器人六自由度抓取 (自己论文查重竟然查到了自己投稿简介,( ╯□╰ ),暂时先删了,后面补上) 示意图 方法流程 单物体抓取实验结果 多物体抓取实验结果 视频 依赖 PCL 1.8 或以上 Libtorch(与安装的Pytorch版本保持一致) python 3.8 致谢 gpg gpd PointNetGPD 6dof-graspne convPoint pointnet