Paper | Video | Project Page
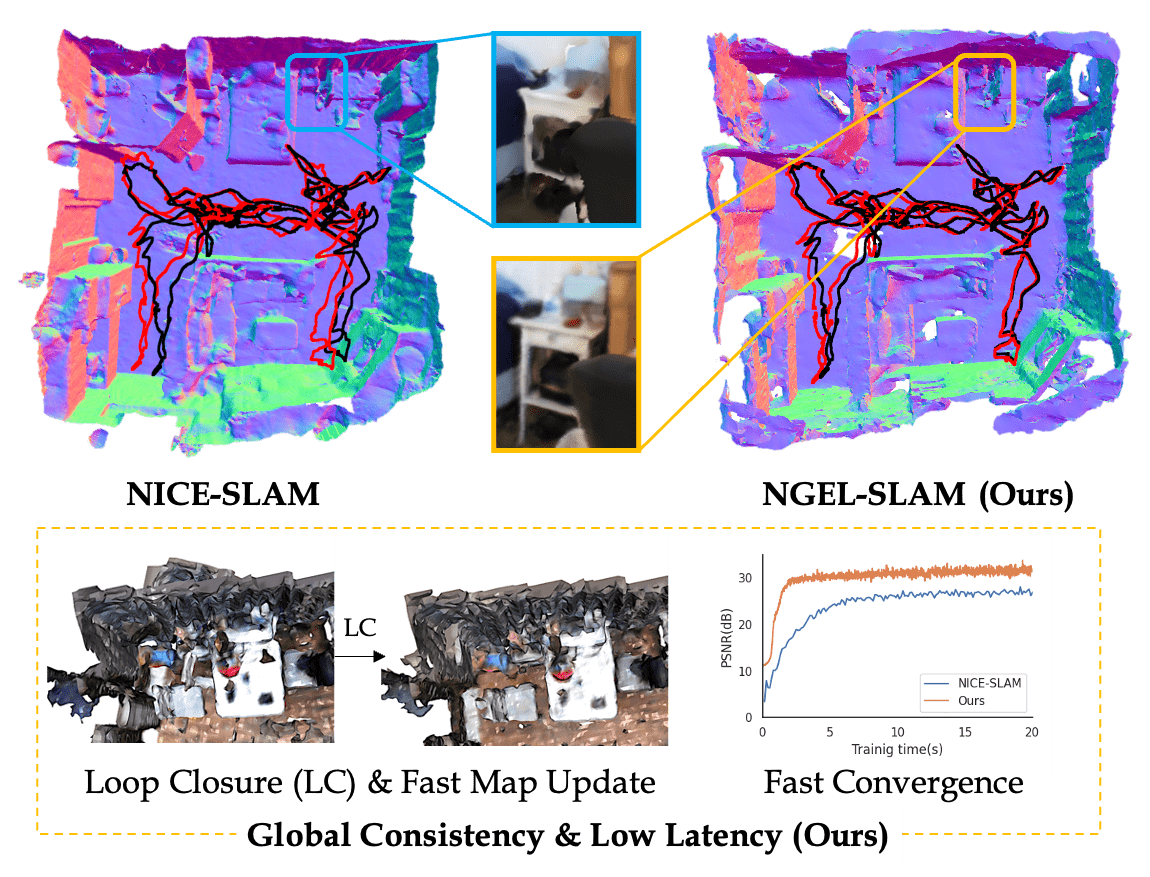
NGEL-SLAM: Neural Implicit Representation-based Global Consistent Low-Latency SLAM System
Yunxuan Mao, Xuan Yu, Kai Wang, Yue Wang, Rong Xiong, Yiyi Liao
ICRA 2024
Please follow the instructions below to install the repo and dependencies.
mkdir catkin_ws && cd catkin_ws
mkdir src && cd src
git clone https://github.com/YunxuanMao/ngel_slam.git
cd ..
catkin_makeSee orb-slam3-ros for more detail.
conda create -n ngel python=3.8
conda activate ngel
pip install torch==1.10.1+cu113 torchvision==0.11.2+cu113 torchaudio==0.10.1 -f https://download.pytorch.org/whl/cu113/torch_stable.html
pip install -r requirements.txt
cd yx_kaolin
python setup.py developWhat's more, kaolin-wisp should be installed.
You should put your data in data folder follow NICE-SLAM and generate a rosbag for ORB-SLAM3
python write_bag.py --input_folder '{PATH_TO_INPUT_FOLDER}' --output '{PATH_TO_ROSBAG}' --frame_id 'FRAME_ID_TO_DATA'
You should change the intrinsics manually in write_bag.py.
You should first start the ORB-SLAM3-ROS, and then using code below
python main.py --config '{PATH_TO_CONFIG}' --input_folder '{PATH_TO_INPUT_FOLDER}' --output '{PATH_TO_OUTPUT}'
If you find our code or paper useful for your research, please consider citing:
@article{mao2023ngel,
title={Ngel-slam: Neural implicit representation-based global consistent low-latency slam system},
author={Mao, Yunxuan and Yu, Xuan and Wang, Kai and Wang, Yue and Xiong, Rong and Liao, Yiyi},
journal={arXiv preprint arXiv:2311.09525},
year={2023}
}
For large scale mapping work, you can refer to NF-Atlas.