Aug 2021: The Livox-lidar tests and corresponding launch files will be uploaded soon. Currenty only Ouster lidar tutorial videos had been made.
Integration of
- FAST-LIO2 (Odometry): A computationally efficient and robust LiDAR-inertial odometry (LIO) package
- SC-PGO (Loop detection and Pose-graph Optimization): Scan Context-based Loop detection and GTSAM-based Pose-graph optimization
- An easy-to-use plug-and-play LiDAR SLAM
- FAST-LIO2 and SC-PGO run separately (see below How to use? tab).
- SC-PGO takes odometry and lidar point cloud topics from the FAST-LIO2 node.
- Finally, an optimized map is made within the SC-PGO node.
- The below commands and the launch files are made for playing the MulRan dataset, but applicable for livox lidars in the same way (you could easily make your own launch files).
# terminal 1: run FAST-LIO2
mkdir -p ~/catkin_fastlio_slam/src
cd ~/catkin_fastlio_slam/src
git clone https://github.com/gisbi-kim/FAST_LIO_SLAM.git
git clone https://github.com/Livox-SDK/livox_ros_driver
cd ..
catkin_make
source devel/setup.bash
roslaunch fast_lio mapping_ouster64_mulran.launch # setting for MulRan dataset
# open the other terminal tab: run SC-PGO
cd ~/catkin_fastlio_slam
source devel/setup.bash
roslaunch aloam_velodyne fastlio_ouster64.launch # setting for MulRan dataset
# open the other terminal tab
# run file_player_mulran (for the details, refer here https://github.com/irapkaist/file_player_mulran)
- We support keyframe scan saver (as in .pcd) and provide a script reconstructs a point cloud map by merging the saved scans using the optimized poses. See here.
-
Tutorial video 1 (using KAIST 03 sequence of MulRan dataset)
- Example result captures
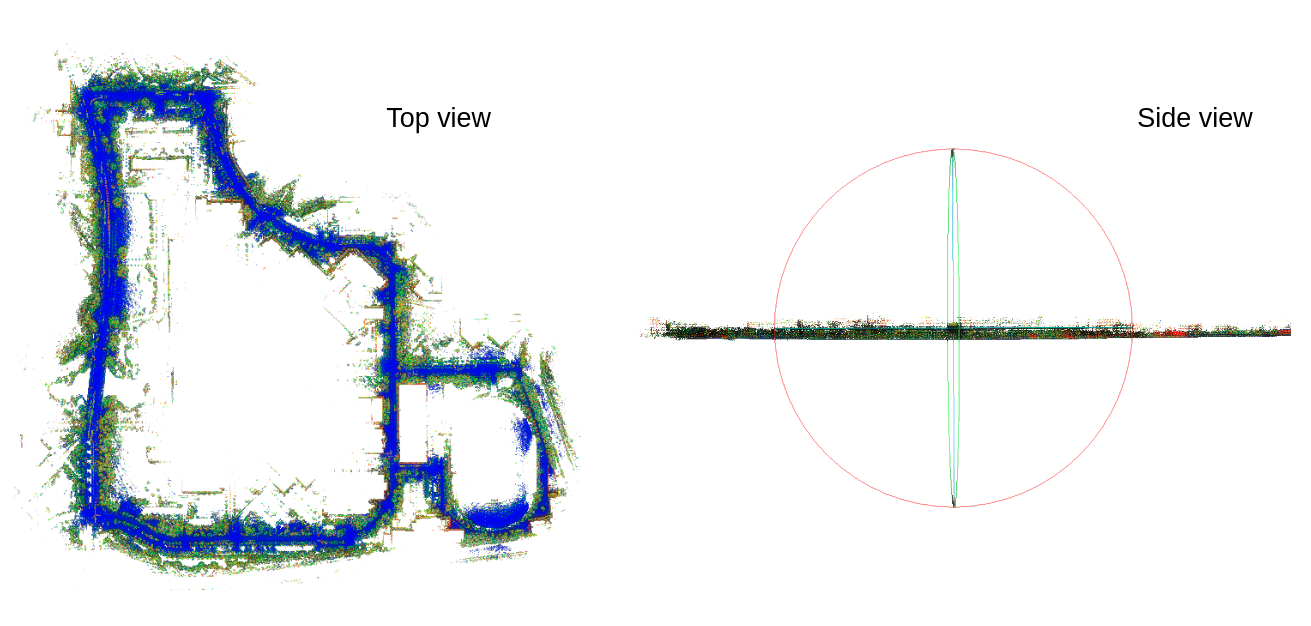
- download the KAIST03 pcd map made by FAST-LIO-SLAM, 500MB
- Example result captures
-
Example Video 2 (Riverside 02 sequence of MulRan dataset)
- Example result captures
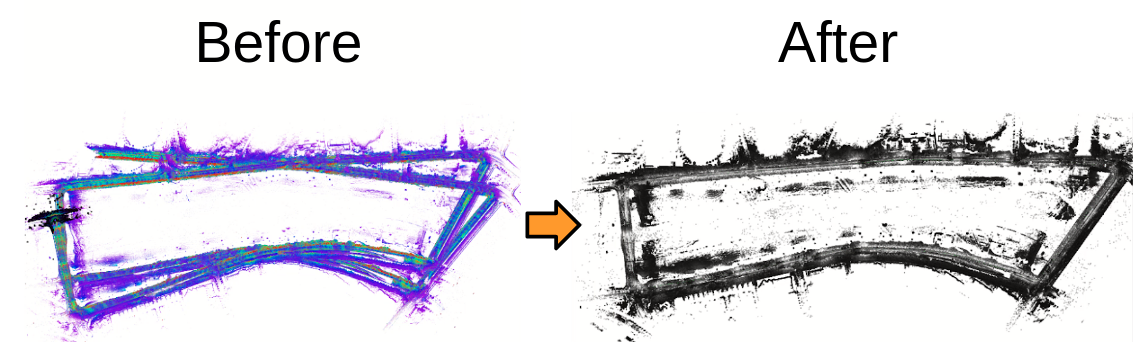
- download the Riverisde02 pcd map made by FAST-LIO-SLAM, 400MB
- Example result captures


- Thanks for FAST_LIO authors.
- You may have an interest in this version of FAST-LIO + Loop closure, implemented by yanliang-wang