
PersFormer: 3D Lane Detection via Perspective Transformer and the OpenLane Benchmark
Li Chen∗†, Chonghao Sima∗, Yang Li∗, Zehan Zheng, Jiajie Xu, Xiangwei Geng, Hongyang Li†, Conghui He, Jianping Shi, Yu Qiao, Junchi Yan. ∗ equal contributions. † corresponding authors
- Paper: arXiv 2203.11089, ECCV 2022 Oral Presentation (2.7% acceptance rate)
- Third-party In-depth Blog on Persformer (recommended)
- Our blog | Slides | Presentation video (4min) | Online talk (50min) | Poster
This repository is the PyTorch implementation for PersFormer.
PersFormer is an end-to-end monocular 3D lane detector with a novel Transformer-based spatial feature transformation module. Our model generates BEV features by attending to related front-view local regions with camera parameters as a reference. It adopts a unified 2D/3D anchor design and an auxiliary task to detect 2D/3D lanes simultaneously, enhancing the feature consistency and sharing the benefits of multi-task learning.
- 2022-11-3: Fix the evaluation pipeline bug and upload the best model of PersFormer on openlaneV1.1 for reproducibility. Other models are coming soon.
- 2022-9-27: Update evaluation metrics, prune gt points by visibility before evaluation, detail can be found in related issue A question about prune_3d_lane_by_visibility; support Gen-LaneNet on OpenLane; support PersFormer on once dataset.
- 2022-5-9: We compared our method on ONCES_3DLanes Dataset, where PersFormer also outperforms other methods.
- 2022-4-12: We released the v1.0 code for PersFormer.
- To run PersFormer, make sure you are using a machine with at least one GPU.
- Please follow INSTALL.md to setup the environment.
- Please refer to OpenLane for downloading OpenLane Dataset.
- Please refer to Gen-LaneNet for downloading Apollo 3D Lane Synthetic Dataset.
- Please follow TRAIN_VAL.md to train and evaluate the model.
- 3D Lane Detection Results (F-Score) in OpenLane.
| Method | Version | All | Up & Down |
Curve | Extreme Weather |
Night | Intersection | Merge& Split |
Best model | x-c | x-f | z-c | z-f | Category Accuracy |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GenLaneNet | 1.1 | 32.3 | 25.4 | 33.5 | 28.1 | 18.7 | 21.4 | 31.0 | - | 0.593 | 0.494 | 0.140 | 0.195 | / |
| 3DLaneNet | 1.1 | 44.1 | 40.8 | 46.5 | 47.5 | 41.5 | 32.1 | 41.7 | - | - | - | - | - | - |
| PersFormer | 1.1 | 50.5 | 45.6 | 58.7 | 54.0 | 50.0 | 41.6 | 53.1 | model | 0.319 | 0.325 | 0.112 | 0.141 | 89.51 |
| PersFormer | 1.2 | 53.1 | 46.8 | 58.7 | 54.0 | 48.4 | 41.4 | 52.5 | model | 0.361 | 0.328 | 0.124 | 0.129 | 88.99 |
- 2D Lane Detection Results (F-Score) in OpenLane. Note that the baseline of 2D branch in PersFormer is LaneATT.
| Method | All | Up& Down |
Curve | Extreme Weather |
Night | Intersection | Merge& Split |
|---|---|---|---|---|---|---|---|
| LaneATT-S | 28.3 | 25.3 | 25.8 | 32.0 | 27.6 | 14.0 | 24.3 |
| LaneATT-M | 31.0 | 28.3 | 27.4 | 34.7 | 30.2 | 17.0 | 26.5 |
| PersFormer | 42.0 | 40.7 | 46.3 | 43.7 | 36.1 | 28.9 | 41.2 |
| CondLaneNet-S | 52.3 | 55.3 | 57.5 | 45.8 | 46.6 | 48.4 | 45.5 |
| CondLaneNet-M | 55.0 | 58.5 | 59.4 | 49.2 | 48.6 | 50.7 | 47.8 |
| CondLaneNet-L | 59.1 | 62.1 | 62.9 | 54.7 | 51.0 | 55.7 | 52.3 |
- 3D Lane Detection Results in ONCE_3DLanes.
| Method | F1(%) | Precision(%) | Recall(%) | CD error(m) | Best model |
|---|---|---|---|---|---|
| 3DLaneNet | 44.73 | 61.46 | 35.16 | 0.127 | / |
| GenLaneNet | 45.59 | 63.95 | 35.42 | 0.121 | / |
| SALAD (paper of ONCE 3DLanes ) | 64.07 | 75.90 | 55.42 | 0.098 | / |
| PersFormer | 72.07 | 77.82 | 67.11 | 0.086 | model |
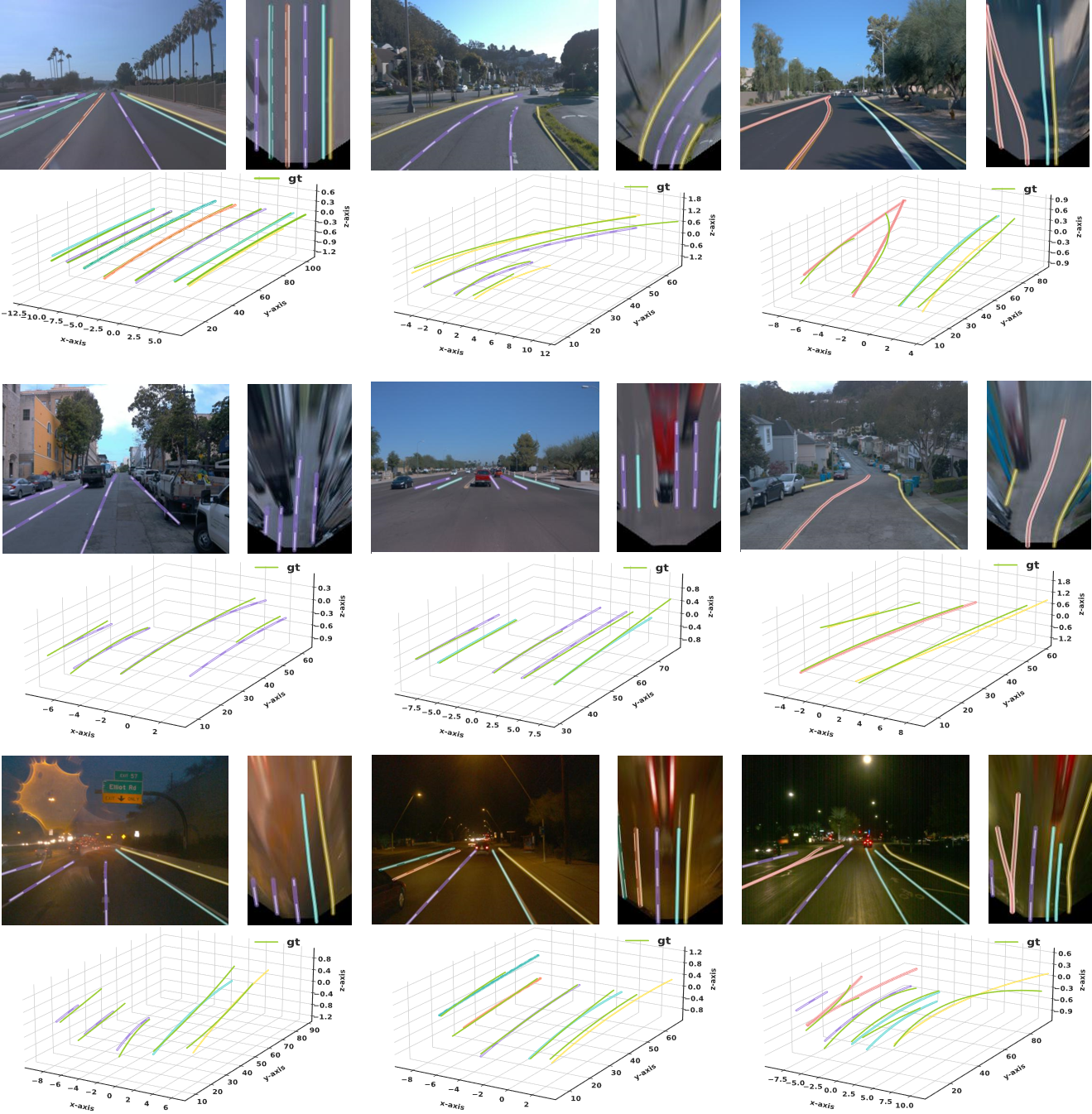
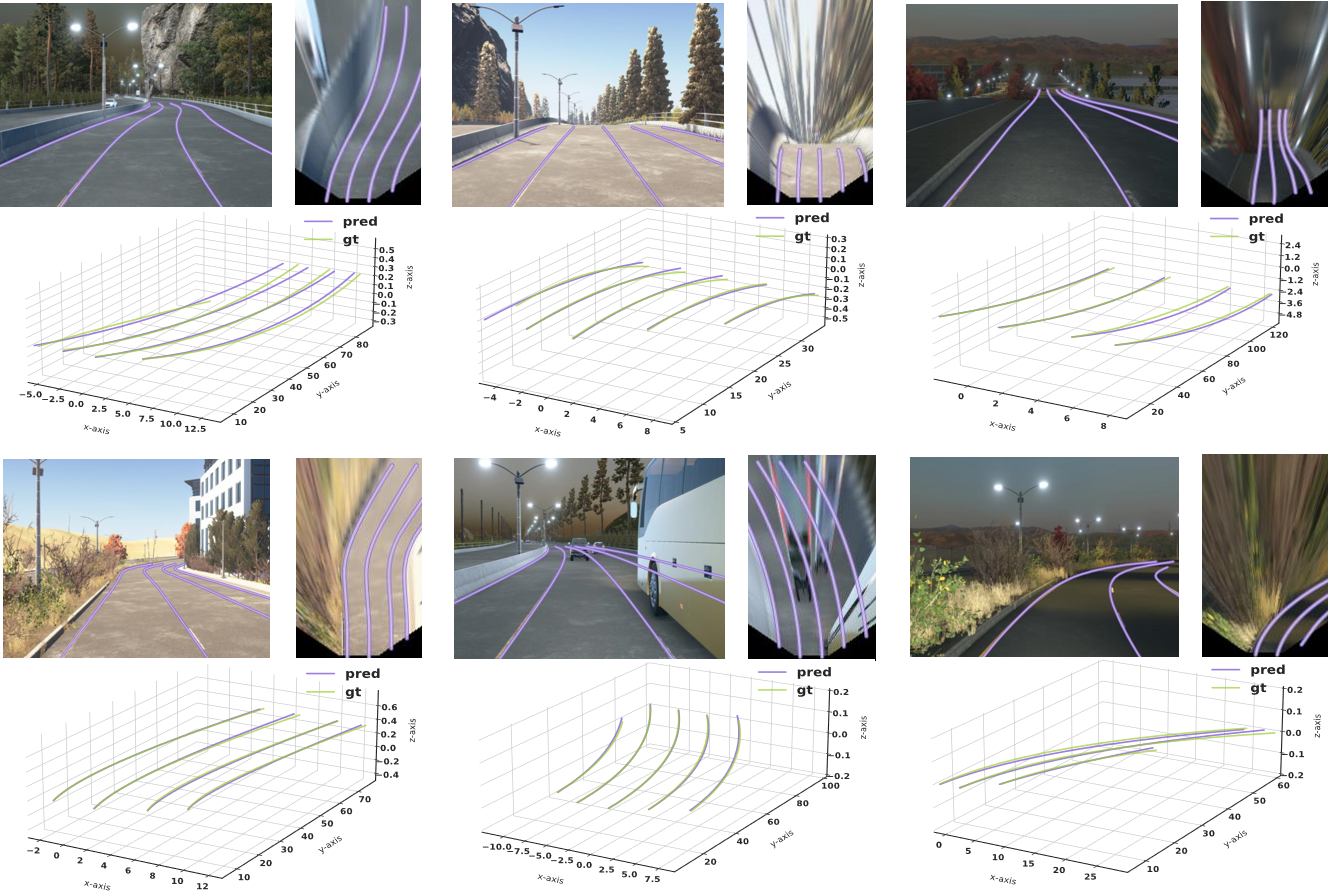
Following are the visualization results of PersFormer on OpenLane dataset and Apollo dataset.
- OpenLane visualization results
- Apollo 3D Synthetic visualization results


Please use the following citation if you find our repo or our paper PersFormer useful:
@inproceedings{chen2022persformer,
title={PersFormer: 3D Lane Detection via Perspective Transformer and the OpenLane Benchmark},
author={Chen, Li and Sima, Chonghao and Li, Yang and Zheng, Zehan and Xu, Jiajie and Geng, Xiangwei and Li, Hongyang and He, Conghui and Shi, Jianping and Qiao, Yu and Yan, Junchi},
booktitle={European Conference on Computer Vision (ECCV)},
year={2022}
} We would like to acknowledge the great support from SenseBee labelling team at SenseTime Research, constructive suggestion from Zihan Ding at BUAA, and the fruitful discussions and comments for this project from Zhiqi Li, Yuenan Hou, Yu Liu, Jing Shao, Jifeng Dai. We thank for the code implementation from Gen-LaneNet, LaneATT and Deformable DETR.
All code within this repository is under Apache License 2.0.