根据高翔博客 一起做RGB-D SLAM(其代码在 gaoxiang12/rgbd-slam-tutorial-gx),从零搭建 RGBD-SLAM。
- Eigen3
- OpenCV3
- PCL 1.7
- G2O (the lastest version)
mkdir build & cd build
cmake ..
make -j2cd build
../bin/generate_pointcloud
../bin/detect_features
../bin/join_pointcloud
../bin/visual_odometry
../bin/rgbdslam-
result of
bin/visual_odometry
-
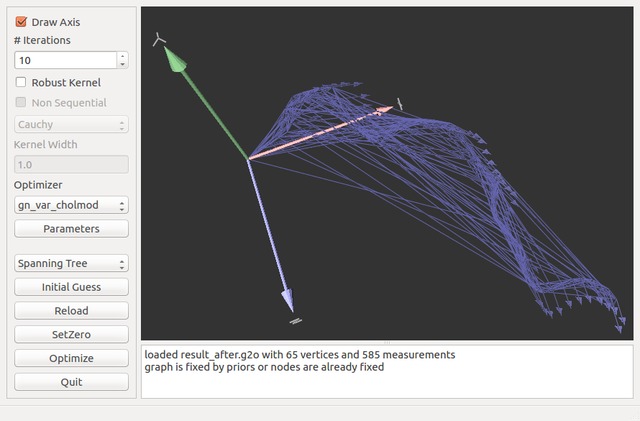
g2o_viewer result_after.g2o, the result ofbin/rgbdslam