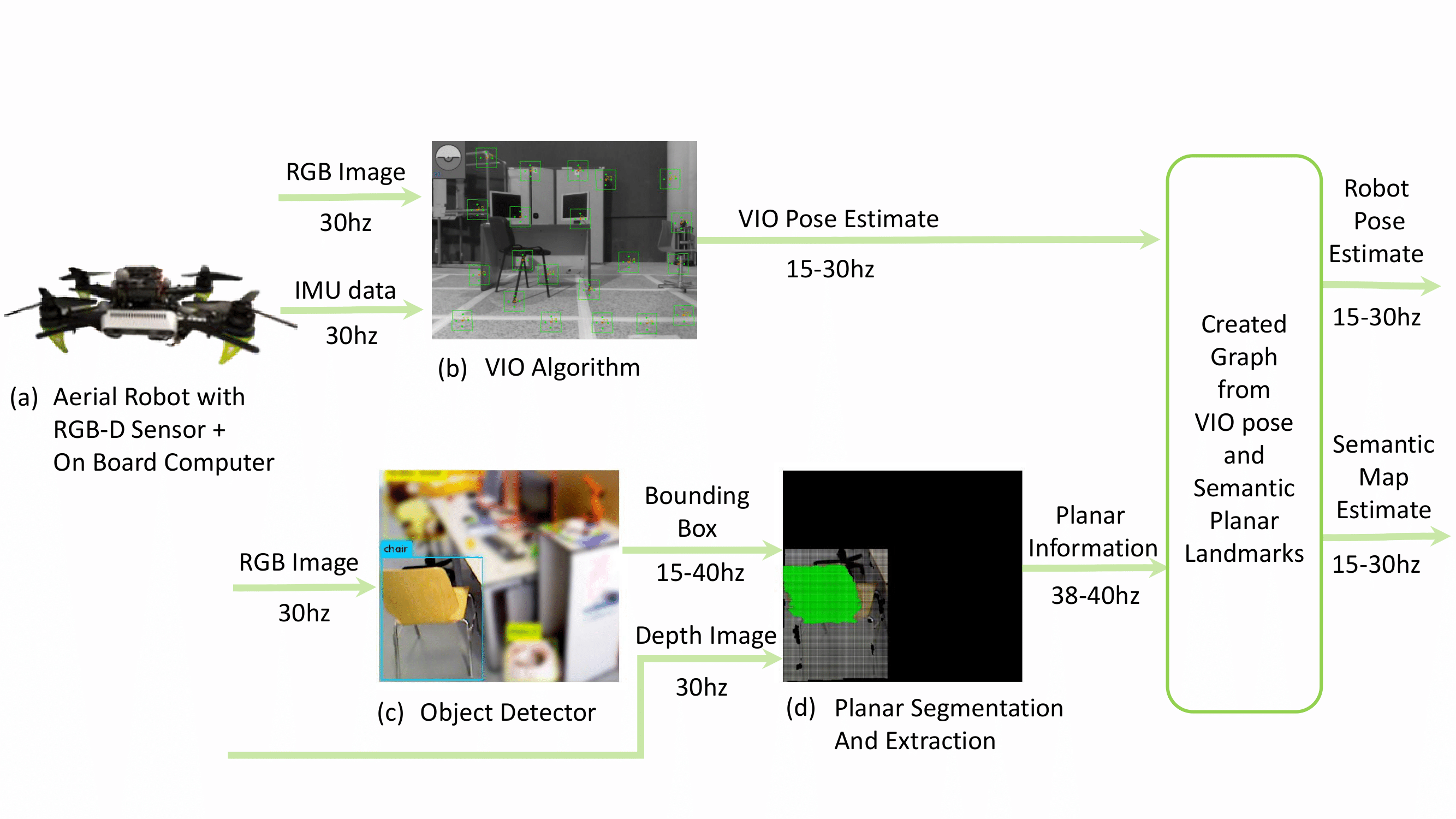
This package can perform optimization of pose estimated from VO/VIO methods which tend to drift over time. It uses planar surfaces extracted from object detections in order to create a sparse semantic map of the environment, thus optimizing the drift of the VO/VIO algorithms.
- A VO/VIO algorithm: ROVIO, VINS_MONO, OKVIS etc.
- An Object Detector: Yolo, Shape Color Detector
Currently it can extract planar surfaces and create a semantic map from from the following objects:
- chair
- tvmonitor
- book
- keyboard
- laptop
- bucket
- car
VPS-SLAM: Visual Planar Semantic SLAM for Aerial Robotic Systems, Hriday Bavle, Paloma de la Puente, Jonathan How, Pascual Campoy, Journal of IEEE Access.
First install g2o following these instructions (assuming ROS kinetic distribution):
- sudo apt-get install ros-kinetic-libg2o
- sudo cp -r /opt/ros/kinetic/lib/libg2o_* /usr/local/lib
- sudo cp -r /opt/ros/kinetic/include/g2o /usr/local/include
Install OctopMap server for map generation capabilities:
- sudo apt install ros-kinetic-octomap*
Create a ros workspace and clone the following packages:
- Download the rosbag:
wget -P ~/Downloads/ https://www.dropbox.com/s/jnywuvcn2m9ubu2/entire_lab_3_rounds.bag
- Create a workspace, clone the repo and compile:
mkdir -p workspace/ros/semantic_slam_ws/src/ && cd workspace/ros/semantic_slam_ws/src/
git clone https://github.com/hridaybavle/semantic_slam && git clone https://bitbucket.org/hridaybavle/bucket_detector.git
cd .. && catkin build --cmake-args -DCMAKE_BUILD_TYPE=Release
- Launch and visualize
source devel/setup.bash
roslaunch semantic_SLAM ps_slam_with_snap_pose_bucket_det_lab_data_with_octomap.launch bagfile:=${HOME}/Downloads/entire_lab_3_rounds.bag show_rviz:=true

**Note: In the example above octomap is used for mapping. Right now at loop closure the complete map is not optimized and will be done in the future.
If the code is giving problems with you local machine, you can try the docker image created with the repo and the required settings.
Download Docker from: Docker
Follow the commands to run the algorithm with the docker
docker pull hridaybavle/semantic_slam:v1
docker run --rm -it --net="host" -p 11311:11311 hridaybavle/semantic_slam:v1 bash
cd ~/workspace/ros/semantic_slam_ws/
source devel/setup.bash
roslaunch semantic_SLAM ps_slam_with_snap_pose_bucket_det_lab_data_with_octomap.launch bagfile:=${HOME}/Downloads/entire_lab_3_rounds.bag show_rviz:=false
Open a new terminal and rviz in local machine
cd ~/Downloads/ && wget https://raw.githubusercontent.com/hridaybavle/semantic_slam/master/rviz/graph_semantic_slam.rviz
rviz -d graph_semantic_slam.rviz
-
/SQ04/snap_vislam/vislam/pose (geometry_msgs/PoseStamped)
The default snapdragon VIO pose published in NED in frame. This message can be remapped remapped to any other VO pose message publishing in NED frame. (See frame conventions) -
/rovio/odometry (geometry_msgs/PoseStamped)
The VIO odometry published in ENU frame. Can be remapped to the desired topic name in the launcher. -
/depth_registered/points (sensor_msgs/PointCloud2) The point cloud required for planar surface extraction.
-
/darknet_ros/bounding_boxes(darknet_msgs_ros/BoundingBoxes)
The detection bounding boxes published by yolo if using the yolo detector ros package. -
/image_processed/bounding_boxes(ShapeColor_ObjectDetection/DetectedObjects) The detection bounding boxes if using the bucket detector. It can be downloaded from the link above.
-
robot_pose(geometry_msgs/PoseStamped) The pose of the robot estimated by the algo.
-
robot_path(nav_msgs/Path)
The path of the robot psoe for visualization. -
keyframe_poses(geometry_msgs/PoseArray)
The poses of the keyframe being added to the g2o graph. -
mapped_landmarks(visualization_msgs/MarkerArray)
The mapped semantic planar surfaces. -
detected_landmarks(visualization_msgs/MarkerArray)
The detected landmarks in the current frame.
The configurations of the algorithms can be found inside the cfg folder in order to be changed accordingly.