
ORORA-SLAM: SLAM using Outlier-robust radar odometry (ORORA) + ScanContext-based Loop Closing
- In this repository, a (minimal) SLAM problem is defeind as SLAM = Odometry + Loop closing, and the optimized states are only robot poses along a trajectory.
- Based on the above view, this repository aims to integrate current available radar odometry, radar place recognition, and pose-graph optimization.
- Radar odometry: ORORA open source.
- The odometry modules consumes file-based input (not ROS subscription) in this example. See here for the details.
- Radar place recognition: Scan Context open source
- In MulRan dataset paper, the radar scan context is also proposed, but in this repository we use a Cartesian 2D feature point cloud (extracted via cen2019 method) as an input for the original Scan Context (IROS2018) method and it works.
- The Scan Context-based loop detection is included in the file
pgo/SC-A-LOAM/laserPosegraphOptimization.cpp.
- Pose-graph optimization
- iSAM2 in GTSAM is used. See
pgo/SC-A-LOAM/laserPosegraphOptimization.cppfor the details (ps. the implementation is eqaul to SC-A-LOAM and it meanslaserPosegraphOptimization.cppnode is generic!)
- iSAM2 in GTSAM is used. See
- Radar odometry: ORORA open source.
- ORORA: OpenCV, and SC-PGO: GTSAM
- Code is tested on Ubuntu 20.04 with ROS Noetic.
First, clone and build. Note, there's a submodule in the repository.
$ mkdir -p ~/catkin_radarslam/src && cd ~/catkin_radarslam/src
$ git clone https://github.com/gisbi-kim/navtech-radar-slam.git
$ cd navtech-radar-slam && git submodule init && git submodule update
$ cd ../..
$ catkin_make
Second,
- Download a sequence from the MulRan dataset (you need to download polar_oxford_form.zip)
- Change this line in the yeti launch to your downloaded and unzipped radar data directory path.
Then, enjoy!
$ source devel/setup.bash
$ roslaunch src/navtech-radar-slam/launch/navtech_radar_slam_mulran.launch seq_dir:=${DATA_DIR}
For example,
$ roslaunch src/navtech-radar-slam/launch/navtech_radar_slam_mulran.launch seq_dir:="/media/shapelim/UX980/UX960NVMe/mulran-radar/KAIST03"
- The examples are from MulRan dataset, which is suitable to evaluate the radar odometry or SLAM algorithm in complex urban sites.
- The MulRan dataset provides the oxford-radar-robotcar-radar data format (i.e., meta data such as ray-wise timestamps are imbedded in an radar image, see details here)

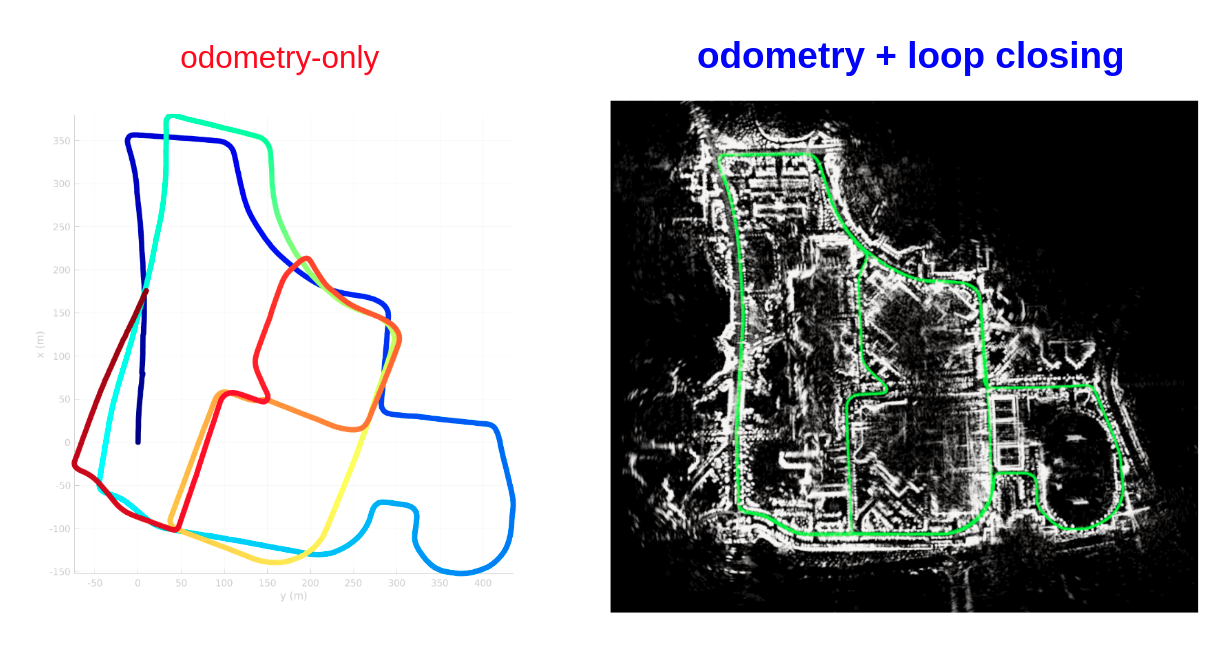
- Video (youtube link)
- Capture:

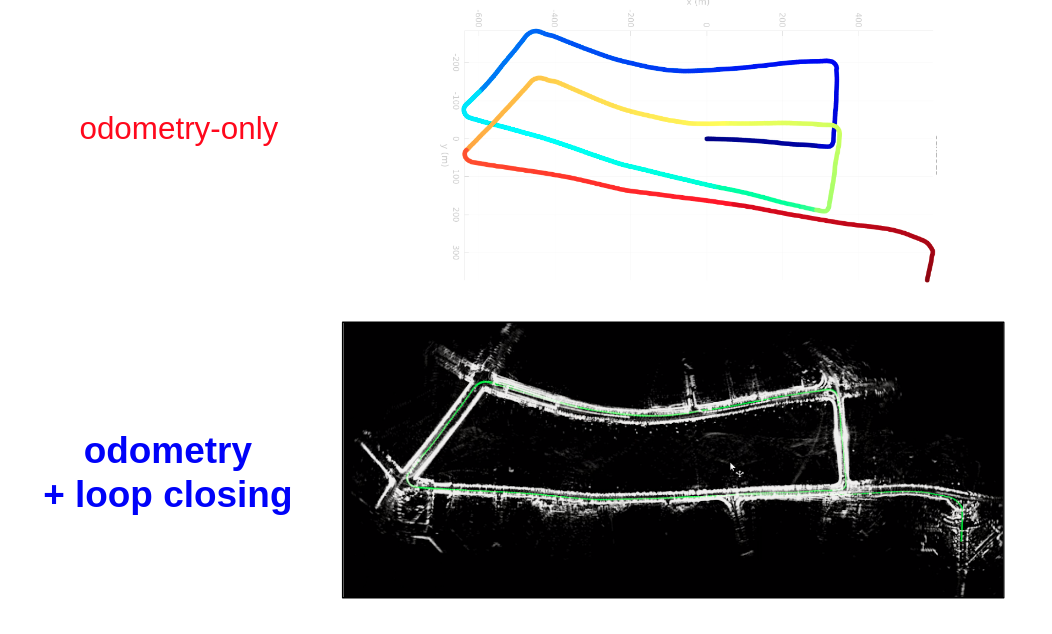
- Video (youtube link)
- Capture:

If you cite this repository, please consider below papers.
- ORORA open source for radar odometry:
@INPROCEEDINGS { lim-2023-icra, author = {Lim, Hyungtae and Han, Kawon and Shin, Gunhee and Kim, Giseop and Hong, Songcheol and Myung, Hyun}, title = { ORORA: Outlier-robust radar odometry }, booktitle = { Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) }, pages={2046--2053}, year = { 2023 }, } - Yeti open source for radar odometry:
@ARTICLE{burnett_ral21, author = {Keenan Burnett, Angela P. Schoellig, Timothy D. Barfoot}, journal={IEEE Robotics and Automation Letters}, title={Do We Need to Compensate for Motion Distortion and Doppler Effects in Spinning Radar Navigation?}, year={2021}, volume={6}, number={2}, pages={771-778}, doi={10.1109/LRA.2021.3052439}} } - Scan Context open source for place recognition:
@INPROCEEDINGS { gkim-2018-iros, author = {Kim, Giseop and Kim, Ayoung}, title = { Scan Context: Egocentric Spatial Descriptor for Place Recognition within {3D} Point Cloud Map }, booktitle = { Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems }, year = { 2018 }, month = { Oct. }, address = { Madrid } } - MulRan dataset:
@INPROCEEDINGS{ gskim-2020-mulran, TITLE={MulRan: Multimodal Range Dataset for Urban Place Recognition}, AUTHOR={Giseop Kim and Yeong Sang Park and Younghun Cho and Jinyong Jeong and Ayoung Kim}, BOOKTITLE = { Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) }, YEAR = { 2020 }, MONTH = { May }, ADDRESS = { Paris } }
- About utilities
- support ROS-based input (topic subscription)
- support a resulting map save functions.
- About performances
- support reverse loop closing.
- enhance RS (radius-search) loop closings.