ROS package that automatically generates point-to-point cubic trajectories connecting pairs of randomly generated points. After running a single launch file you should be able see different random trajectories appearing on the rqt_plot GUI (i.e. a different set of trajectories every 20 seconds).
-
Download the package into your catkin workspace, if you do not have a catkin workspace, follow the following link
-
From your catkin workspace:
catkin_make
-
After your workspace is ready, you need to make all of the nodes executable, run the following comands from the "scripts" folder containing all the nodes
chmod +x plot_cubic_traj.py chmod +x points_generator.py chmod +x compute_cubic_coeffs.py chmod +x plot_cubic_traj.py
-
You can now launch the package by running:
roslaunch AR_week5_test cubic_traj_gen.launch -
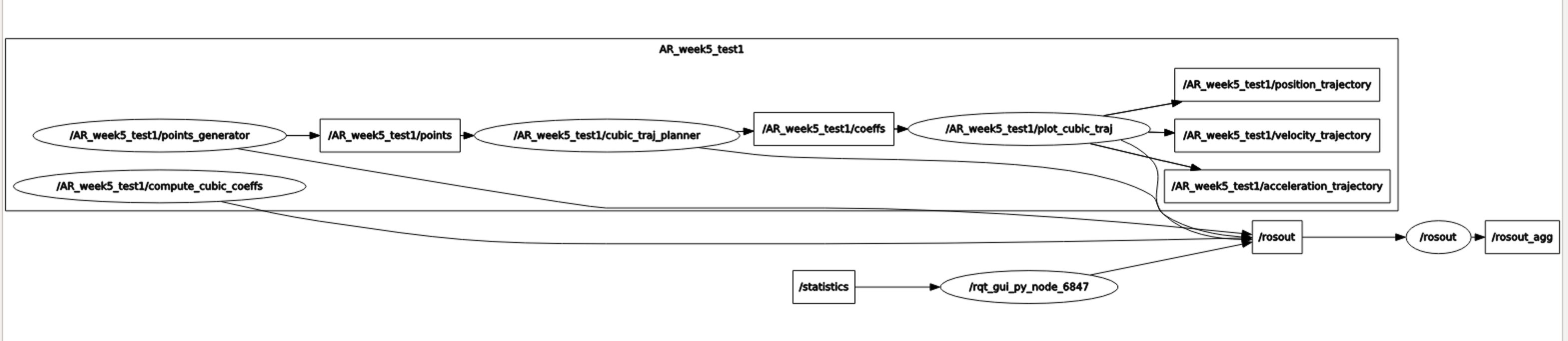
After 20 seconds, if you run:
rqt_graphYou should be able to see the visual representation of how the package works:
-
To visulise the trajectories, run: (don't forget to add position_trajectory, velocity_trajectory and acceleration_trajectory topics in the GUI)
-
rqt_plot

- python 2.7
- catkin
- ros-kinetic
- rqt
- NumPy
Everything else you need to know is in the comments.
Star, fork, do your thing.