Marvin Klingner, Jan-Aike Termöhlen, Jonas Mikolajczyk, and Tim Fingscheidt – ECCV 2020
Self-supervised monocular depth estimation usually relies on the assumption of a static world during training which is violated by dynamic objects. In our paper we introduce a multi-task learning framework that semantically guides the self-supervised depth estimation to handle such objects.

If you find our work useful or interesting, please consider citing our paper:
@inproceedings{klingner2020selfsupervised,
title = {{Self-Supervised Monocular Depth Estimation: Solving the Dynamic Object Problem by Semantic Guidance}},
author = {Marvin Klingner and
Jan-Aike Term\"{o}hlen and
Jonas Mikolajczyk and
Tim Fingscheidt
},
booktitle = {{European Conference on Computer Vision ({ECCV})}},
year = {2020}
}
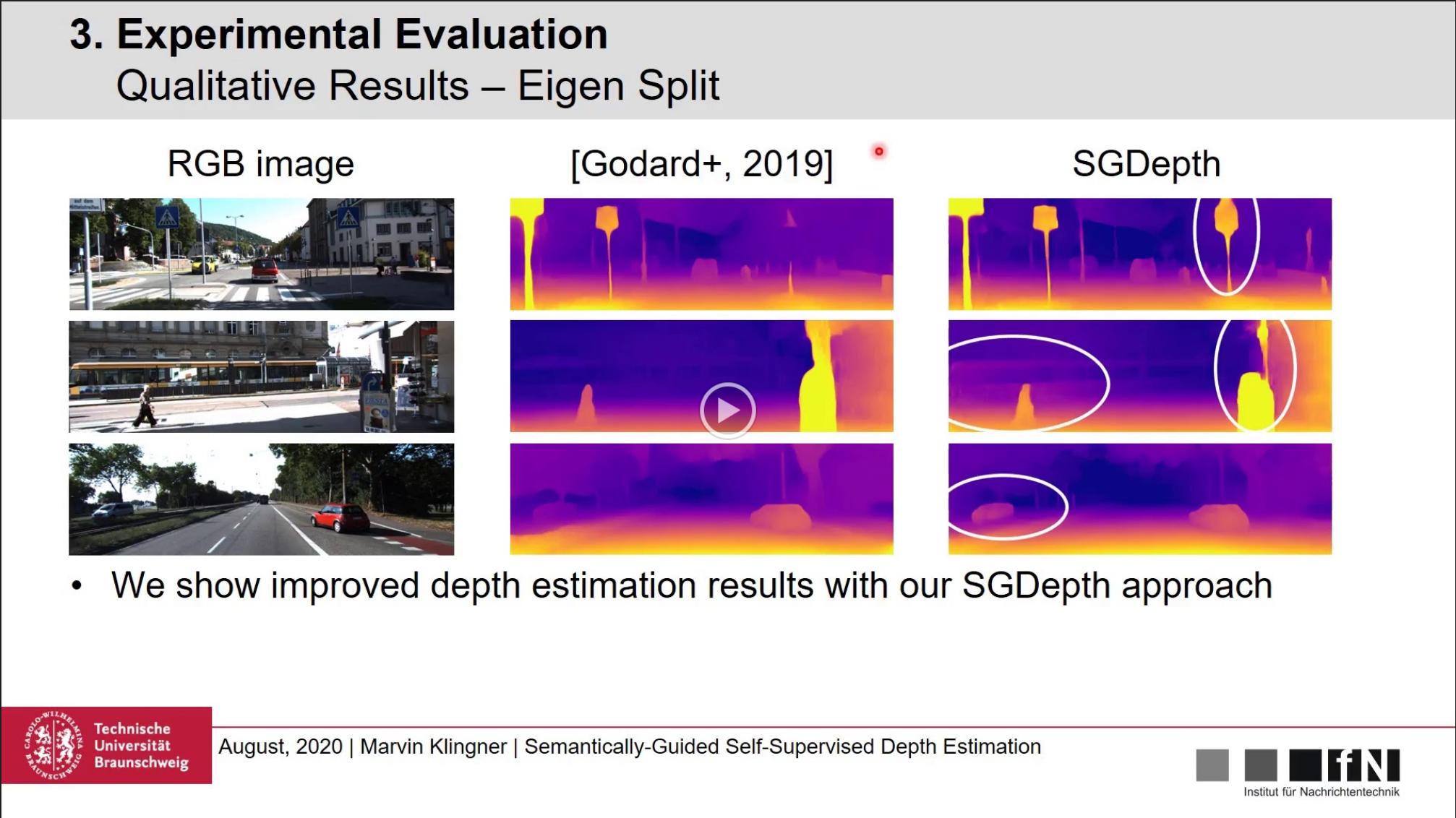
As a consequence of the multi-task training, dynamic objects are more clearly shaped and small objects such as traffic signs or traffic lights are better recognised in comparison to previous methods.

| Model | Resolution | Abs Rel | Sq Rel | RMSE | RMSE log | δ < 1.25 | δ < 1.25^2 | δ < 1.25^3 |
|---|---|---|---|---|---|---|---|---|
| SGDepth only depth | 640x192 | 0.117 | 0.907 | 4.844 | 0.196 | 0.875 | 0.958 | 0.980 |
| SGDepth full | 640x192 | 0.113 | 0.835 | 4.693 | 0.191 | 0.879 | 0.961 | 0.981 |

We recommend to use Anaconda. An environment.yml file is provided.
We use PyTorch 1.1 with Cuda 10.0. An requirements.txt also exists. Older and newer versions of mentioned packages may also work. However, from pytorch 1.3 on, the default behaviour of some functions (e.g. grid_sample()) did change, which needs to be considered when training models with the newest pytorch releases.
To start working with our code, do the following steps:
- In your project dir export the environment variable for the checkpoints:
export IFN_DIR_CHECKPOINT=/path/to/folder/Checkpoints - Download the Cityscapes dataset: https://www.cityscapes-dataset.com/ and put it in a folder "Dataset"
- Download KITTI dataset: http://www.cvlibs.net/datasets/kitti/ and place it in the same dataset folder. To ensure that you have the same folder structure as we have, you can directly use the script
dataloader\data_preprocessing\download_kitti.py. - If you want to evaluate on the KITTI 2015 stereo dataset, also download it from http://www.cvlibs.net/datasets/kitti/ and apply the
dataloader\data_preprocessing\kitti_2015_generate_depth.pyto generate the depth maps. - Prepare the dataset folder:
- export an environment variable to the root directory of all datasets:
export IFN_DIR_DATASET=/path/to/folder/Dataset - Place the json files in your
cityscapesfolder. Please take care, that the folder is spelled exactly as given here:"cityscapes". - Place the json files in your
kittifolder. Please take care, that the folder is spelled exactly as given here:"kitti". - Place the json files in your
kitti_zhou_splitfolder. Please take care, that the folder is spelled exactly as given here:"kitti_zhou_split". - Place the json files in your
kitti_kitti_splitfolder. Please take care, that the folder is spelled exactly as given here:"kitti_kitti_split". - Place the json files in your
kitti_2015folder containing the KITTI 2015 Stereo dataset. Please take care, that the folder is spelled exactly as given here:"kitti_2015".
- export an environment variable to the root directory of all datasets:
For further information please also refer to our dataloader: Dataloader Repository
The inference script is working independently. It just imports the model and the arguments. It inferences all images in a given directory and outputs them to defined directory.
python3 inference.py \
--model-path sgdepth_eccv_test/zhou_full/epoch_20/model.pth \
--inference-resize-height 192 \
--inference-resize-width 640 \
--image-path /path/to/input/dir \
--output-path /path/to/output/dir
You can also define output with --output-format .png or .jpg.
For evaluation of the predicted depth use eval_depth.py.
Specify which model to use with the --model-name and the --model-load flag. The path is relative from the exported checkpoint directory.
An example is shown below:
python3 eval_depth.py\
--sys-best-effort-determinism \
--model-name "eval_kitti_depth" \
--model-load sgdepth_eccv_test/zhou_full/checkpoints/epoch_20 \
--depth-validation-loaders "kitti_zhou_test"
Additionally an example script is shown in eval_depth.sh
For the evaluation of the segmentation results on Cityscapes use the eval_segmentation.py
python3 eval_segmentation.py \
--sys-best-effort-determinism \
--model-name "eval_kitti_seg" \
--model-load sgdepth_eccv_test/zhou_full/checkpoints/epoch_20 \
--segmentation-validation-loaders "cityscapes_validation" \
--segmentation-validation-resize-width 1024
--segmentation-validation-resize-height 512 \
--eval-num-images 1
Additionally an example script is shown in eval_segmentation.sh
To train the model use train.py:
python3 train.py \
--model-name zhou_full \
--depth-training-loaders "kitti_zhou_train" \
--train-batches-per-epoch 7293 \
--masking-enable \
--masking-from-epoch 15 \
--masking-linear-increase
If you have any questions feel free to contact us!
This code is licensed under the MIT-License feel free to use it within the boundaries of this license.