Inertial Odometry using GTSAM
Demonstrate sensor fusion for correcting noisy GPS pose using IMU (IO). The input signals are generated by adding noise (upto 50m) to the GPS data.
Install GTSAM and its python bindings as per official instructions. After cloning this repo:
#!bash
$ git submodule update --init --recursive
$ conda create -n gtsam
$ conda activate gtsam
$ pip3 install -r requirements.txtRun Inertial Odometry for sequence, skipping every 10th frame and using the first 6000 frames/datapoints available using the following command:
#!bash
$ python3 src/icin.py --n_skip 10 --n_frames 6000
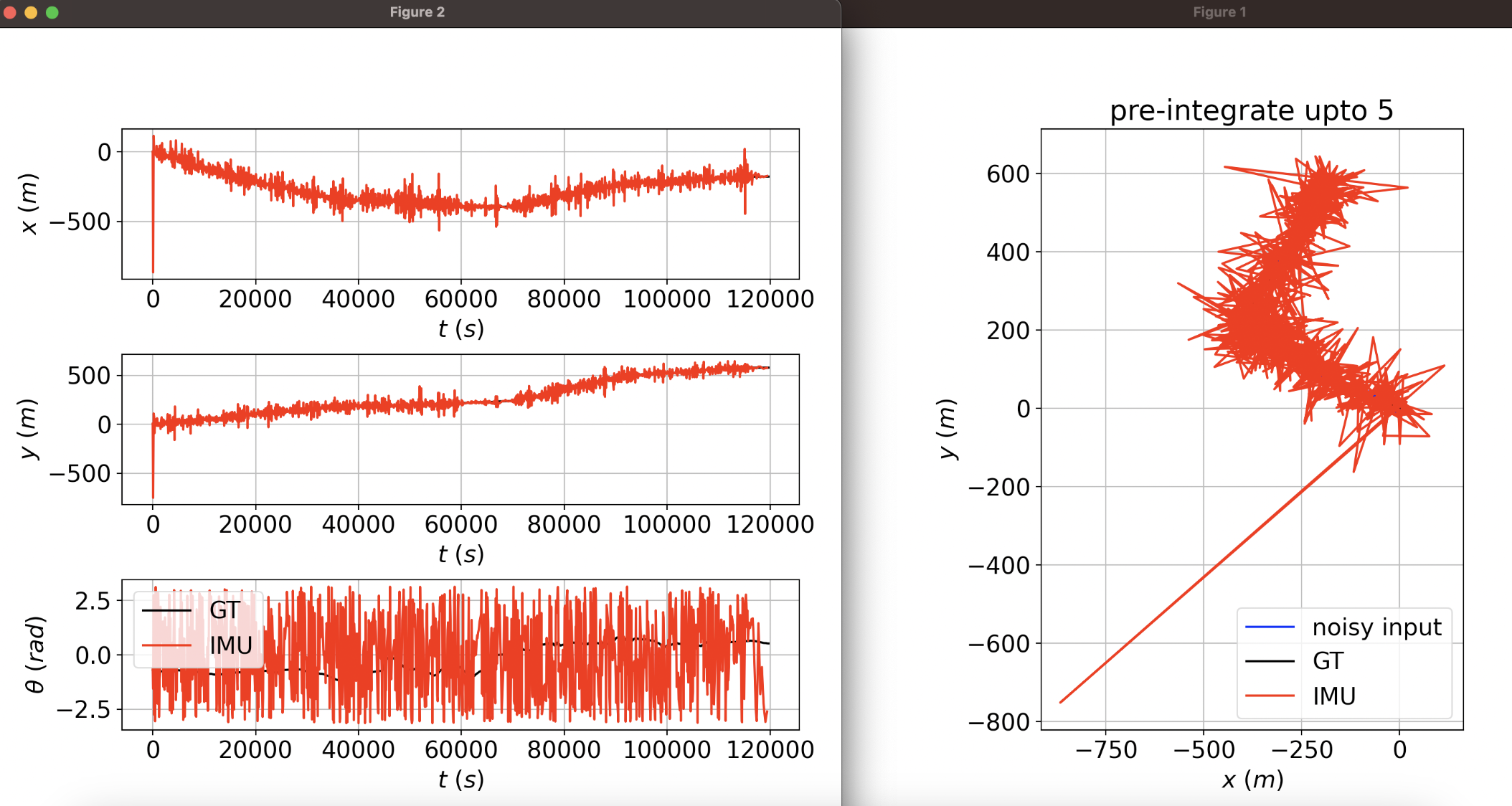
- Increasing pre-integration sample size (by increasing
n_skip), can lead to smoother results as shown below. - Upto 5 samples:
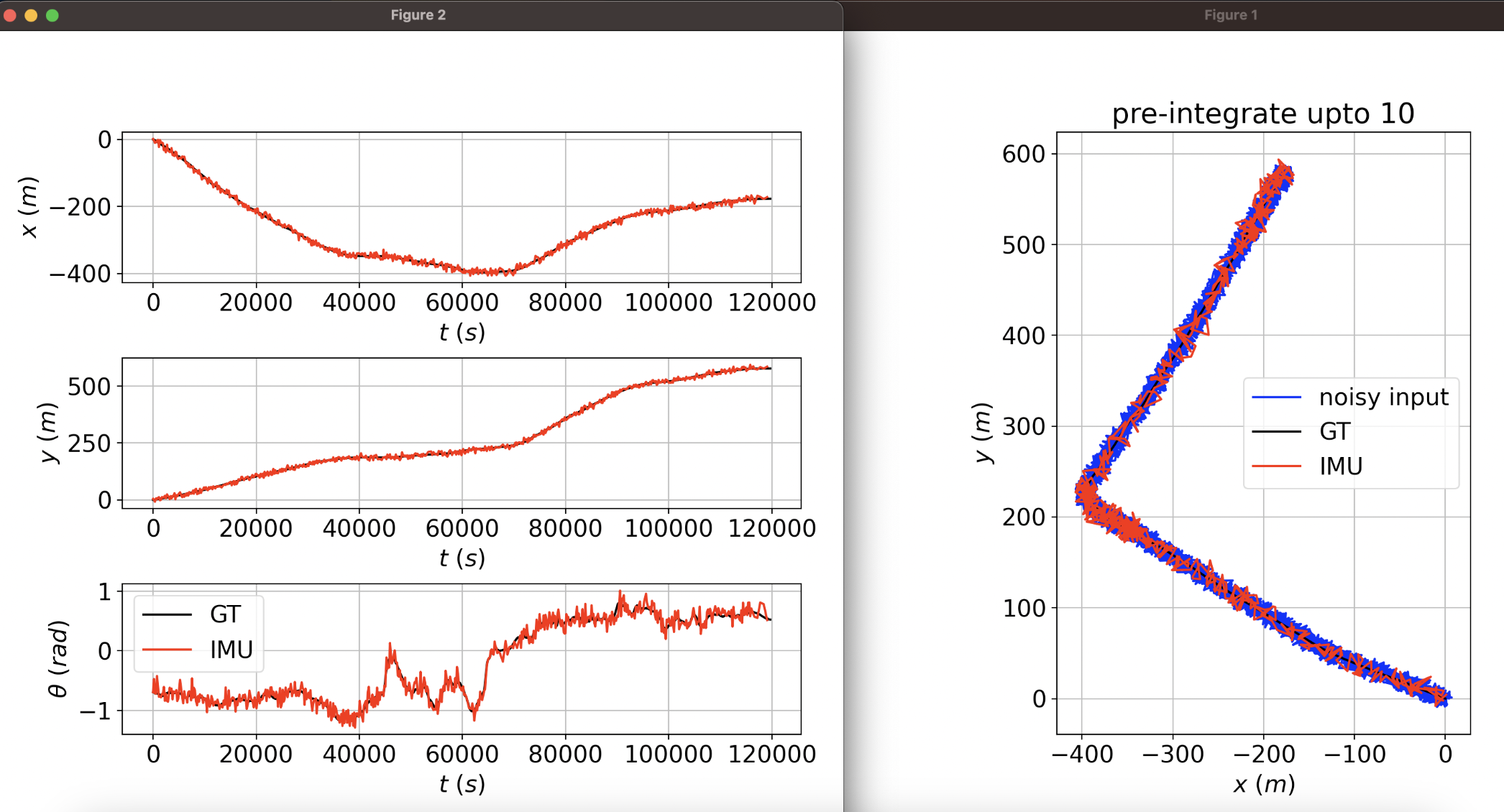
- Upto 10 samples:
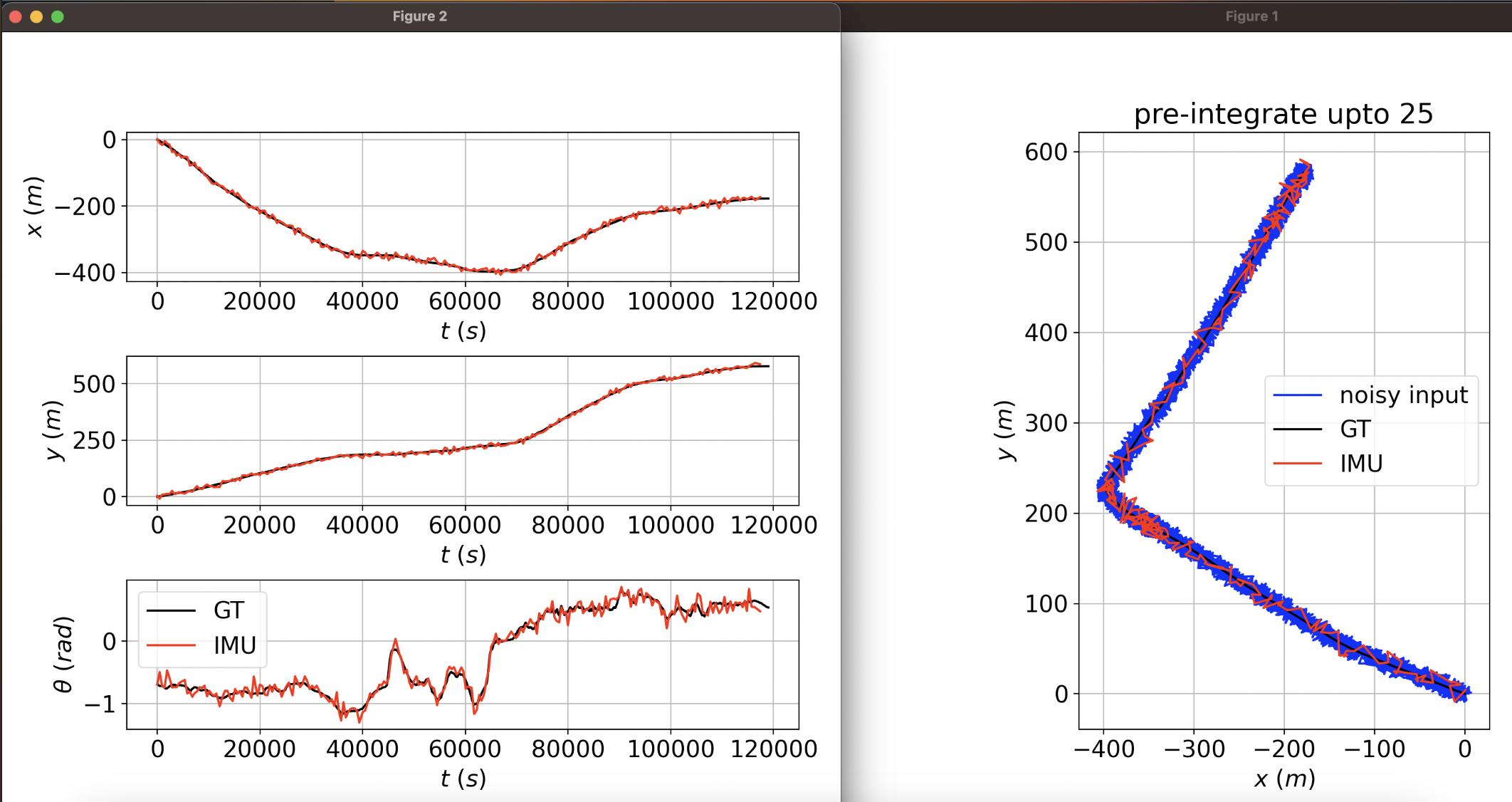
- Upto 25 samples:
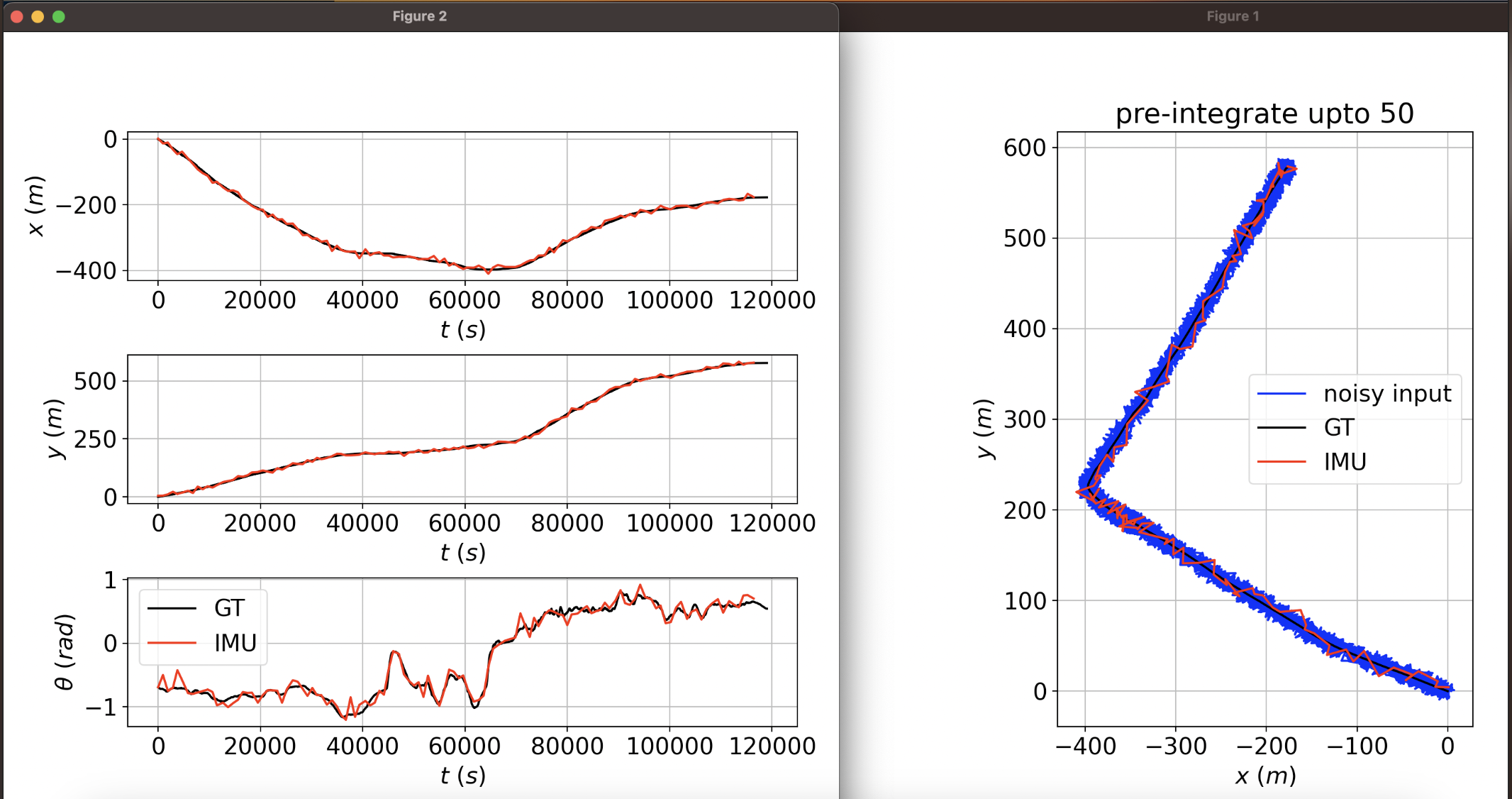
- Upto 50 samples:




Most GTSAM samples are explained and tested on the KITTI dataset which follows the FLU convention for sensor frames. As it describes:
vf: forward velocity, i.e. in direction of vehicle/parallel to earth-surface (m/s)
vl: leftward velocity, i.e. parallel to earth-surface (m/s)
vu: upward velocity, i.e. perpendicular to earth-surface (m/s)
af: forward acceleration in direction of vehicle(m/s^2)
al: leftward acceleration in direction of vehicle left(m/s^2)
au: upward acceleration (m/s^2)
wf: angular rate around forward axis (rad/s)
wl: angular rate around leftward axis (rad/s)
wu: angular rate around upward axis (rad/s)The IMU's axes align with vehicle axes as follows:
| x-axis | y-axis | z-axis | |
|---|---|---|---|
| IMU | Forward | Leftward | Upward |
As my data lacks any vl or vu, I will replace them with a placeholder velocity of 0.1m/s^2. Also, for a vehicle travelling over earth's surface, its unusual to have significant omega (angular rate) in any direction other than the axis perpendicular to earth surface. A typical vehicle data contains wu of magnitudes higher as shown:
 .
.
Similarly, linear acceleration in earth's direction is actually au or earth's gravitation. ax or ay can be used as af depending on which axis coincides with the front direction of the vehicle. In my case, ax is same as af.
 .
.
Number of nodes/elements:
In self.graph:
- x0, b0, v0 : one time for every pair of image:
BetweenFactorConstantBiasfactor b/w b_n and b_n-1ImuFactor
In initial_estimates:
for every image n:
- x_n, b_n, v_n
- (if track found from superpoint output)
GenericProjectionFactorCal3_S2