A few projects I did in ROS while preparing for my independent study in mLab at Penn.
Included are several algorithms that implement control and planning for the F1Tenth vehicle in ROS, using the F1Tenth simulator:
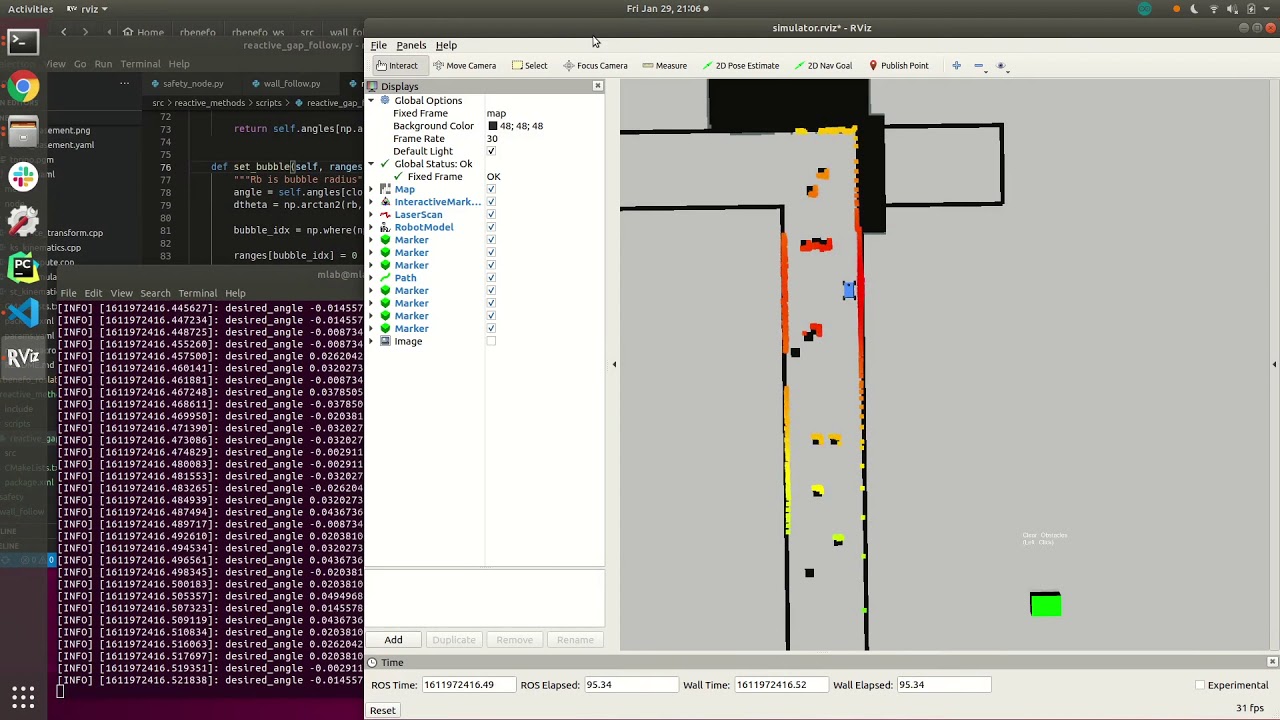
- A reactive gap planner, which implements the Follow The Gap algorithm for simple obstacle avoidance. Below is a youtube link of the output:
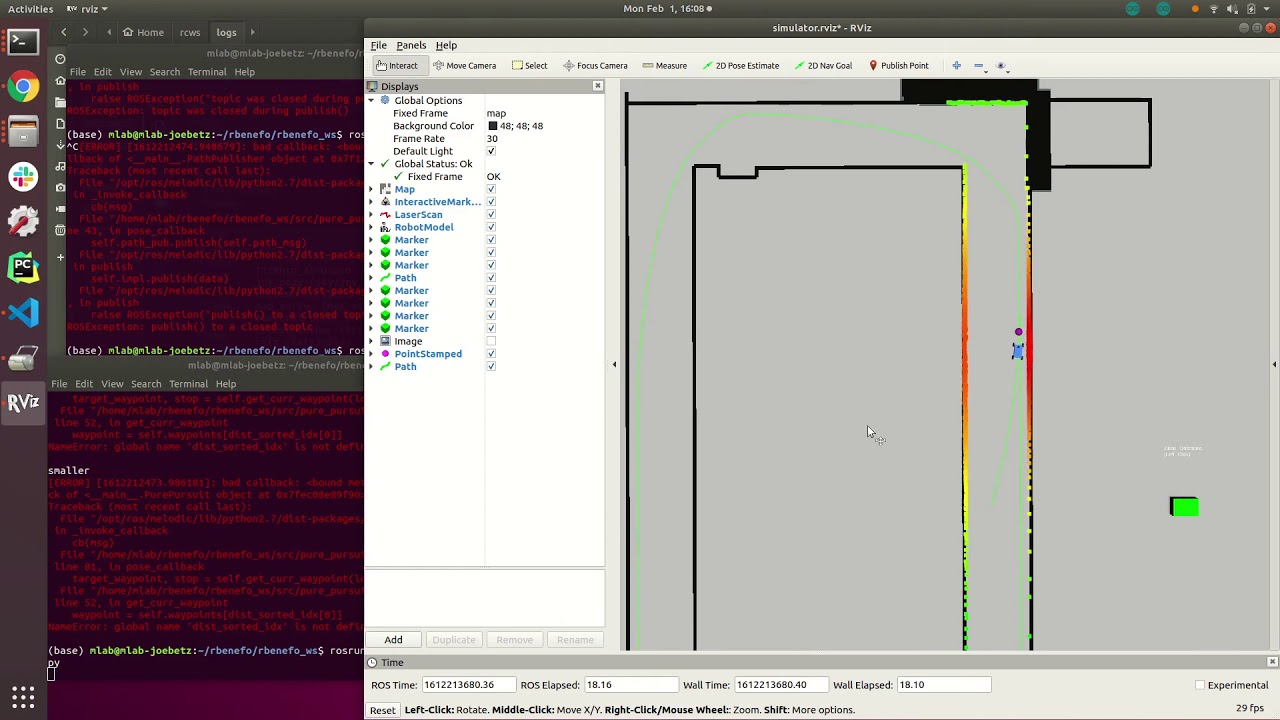
- A pure pursuit planner, which implements the pure pursuit algorithm for trajectory following. Below is a youtube link of the output:
-
A wall following controller.
-
A safety node that activates emergency braking if a crash is imminent.